
大赛作品详情
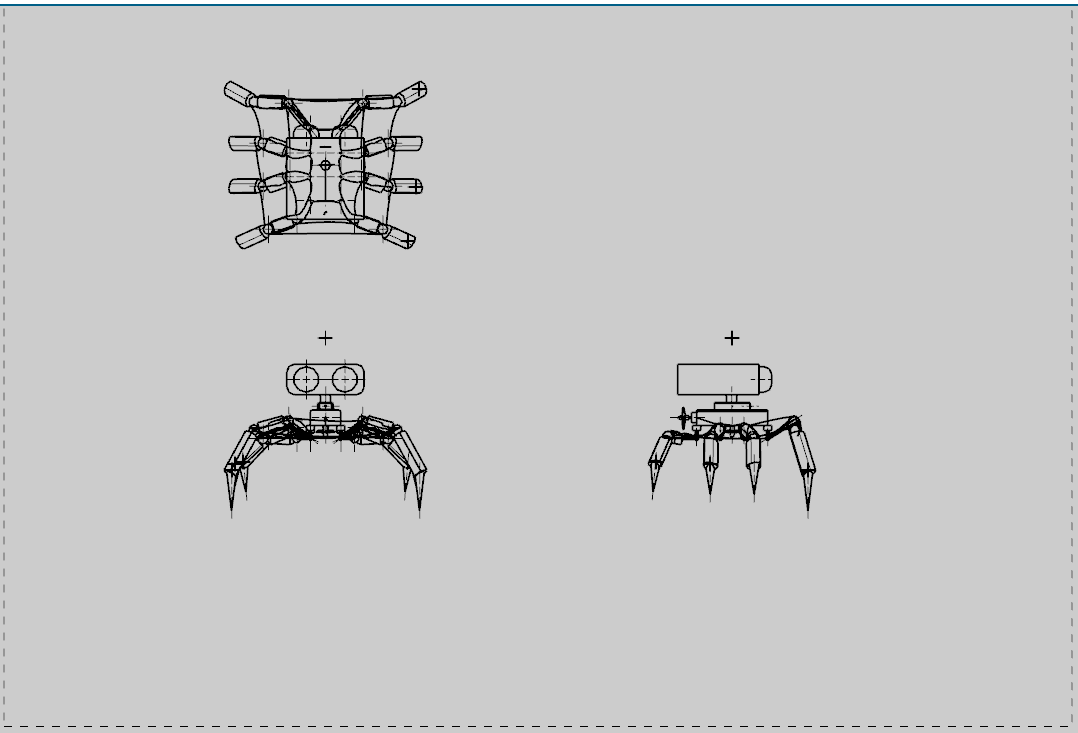
作品名称:基于仿生蜘蛛水下捕捞机器人
学校名称:广东海洋大学
参赛队伍:机械铁三角
参赛学生:张玉书 李军 黄垲狄
指导老师:赵炳利


