截止到2014年底, 我国60岁以上老龄人口已达2.12亿。随着社会老龄化的加剧和人民生活水平的提高, 我国每年新增约200万脑卒中患者, 至2030年,我国将有超过3000万脑卒中患者。另外, 我国各类残疾人总数超过8000万, 其中肢体残疾人口逾2400万。大量的患者、失能者和老年人需要康复和辅助器具, 然而,我国现有康复医疗资源非常紧缺,康复机器人与智能辅助系统的研究和推广应用有望有效缓解康复医疗资源供需矛盾,提高失能患者和老龄人群的生活质量,并带动相关产业发展,增加就业,促进社会和谐,因而具有重要的社会意义。传统的康复训练方法主要是由人工或者借助简单器械带动患肢进行,这类训练方法一般需要多名 医护人员辅助, 而且医护人员的体力消耗很大, 因此,很难保证康复训练的强度和持久性; 同时人工康复训练方法容易受治疗师主观因素影响, 难以保证训练的客观性、精确性和一致性, 限制了康复训练方法的进一步优化和康复效果的提升。尤其是近年来人员成本不断攀升,使得传统训练方法的康复费用不断增加, 给患者家庭及社会都带来很大压力。
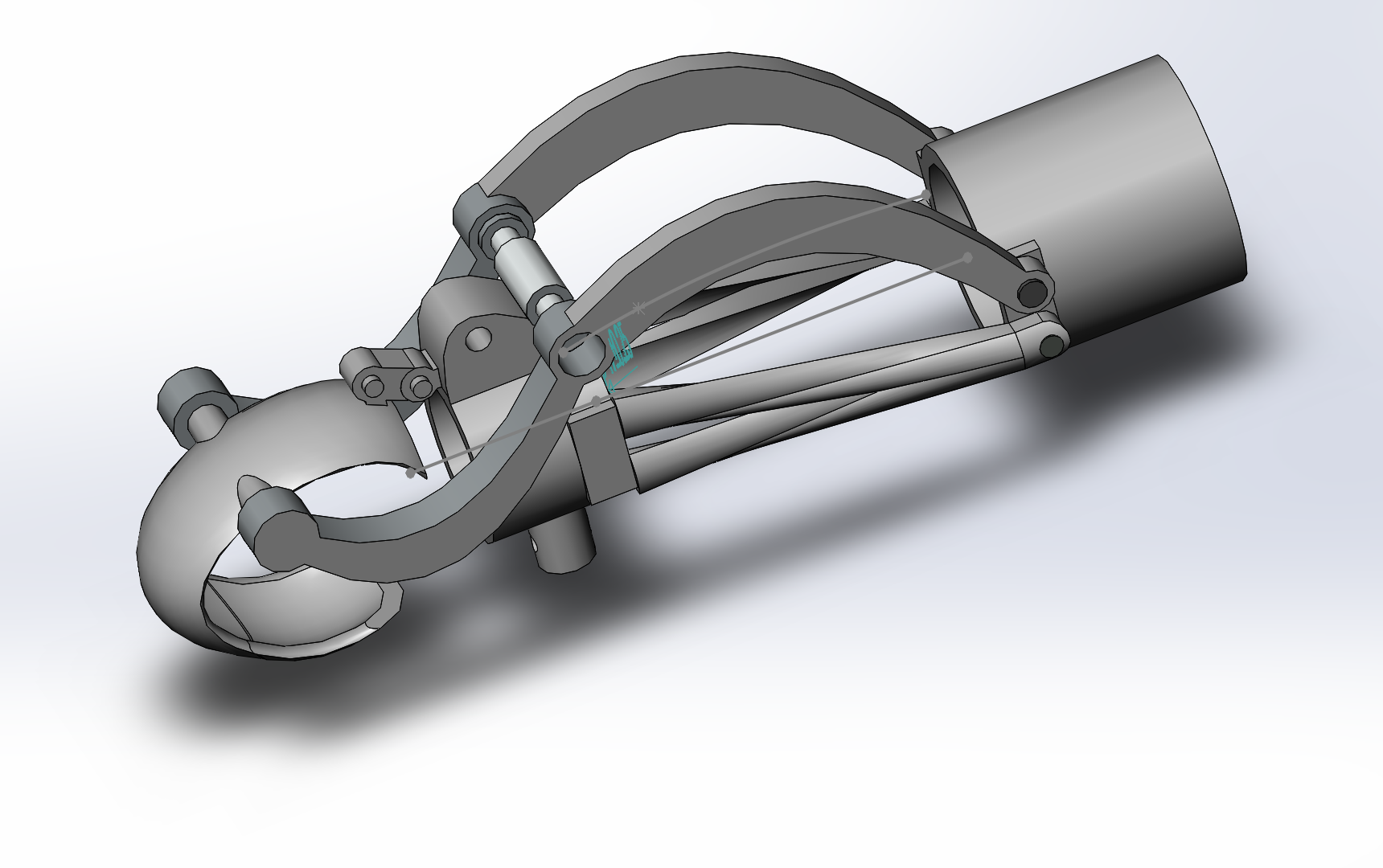
为此,我们设计了一款医疗复健辅助机器人。本次作品采取锁链来带动康复躯干运动,该系统不局限于某个躯干,例如腿和手臂两部分,系统采用主要思想不变,但是针对于腿部和手臂所采取的形和样有所不同。多个连杆结构连接康复部位,进行帮助患者康复运动,患者可以语音操控,也可以进行手机端远程调试。
该作品采用电机驱动,外置电机箱,电机箱采取控制运动,可以根据使用者的需要移动,电机不放置在躯干上目的是防止躯干受到不必要的压力。该系统分别有两种模式,辅助模式和强化模式,分别对应不同人群。
外置电机箱加柔性轴加钢缆牵动的。主要的一个原因是尽可能减轻机器人对病人的负载,方便病人正常运动。机器人的骨架框架大多用的是轻型材料,例如碳纤维,铝合金材料,轻钢等,这样一来重量轻便,不易对病人造成二次伤害。
本次作品使用的是伺服系统(servo mechanism),是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。以树莓派4B为主控制板,采用手机端连接机械系统蓝牙控制和基于Azero语音控制,这样设计既方便康复患者得以应对一些突发情况,康复患者可以通过语音轻松操控系统,而外界看护人员也能通过手机消除一些患者的危险行为。
使用树莓派本身自带的蓝牙模块进行与手机端的相连接。手机端下载相关蓝牙串口app(例蓝牙串口助手,蓝牙调试器等)。基于Azero语音控制,通过组建框架,实现语音控制该机器人。