
大赛作品详情
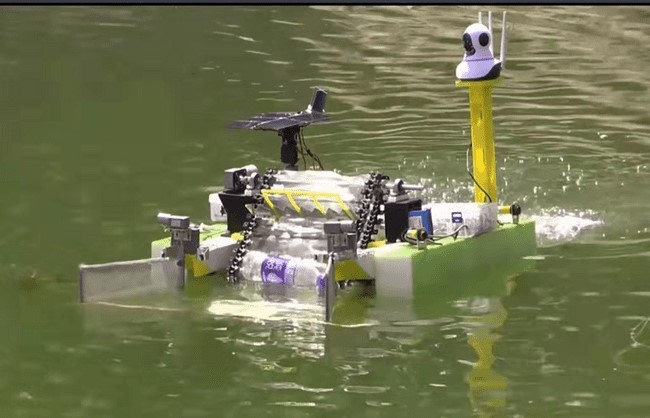
作品名称:清洁无忧-小水域智能巡检打捞船
学校名称:山东科技职业学院
参赛队伍:科创五队
参赛学生:白鸽 姜媛
指导老师:薛蕊


