
大赛作品详情
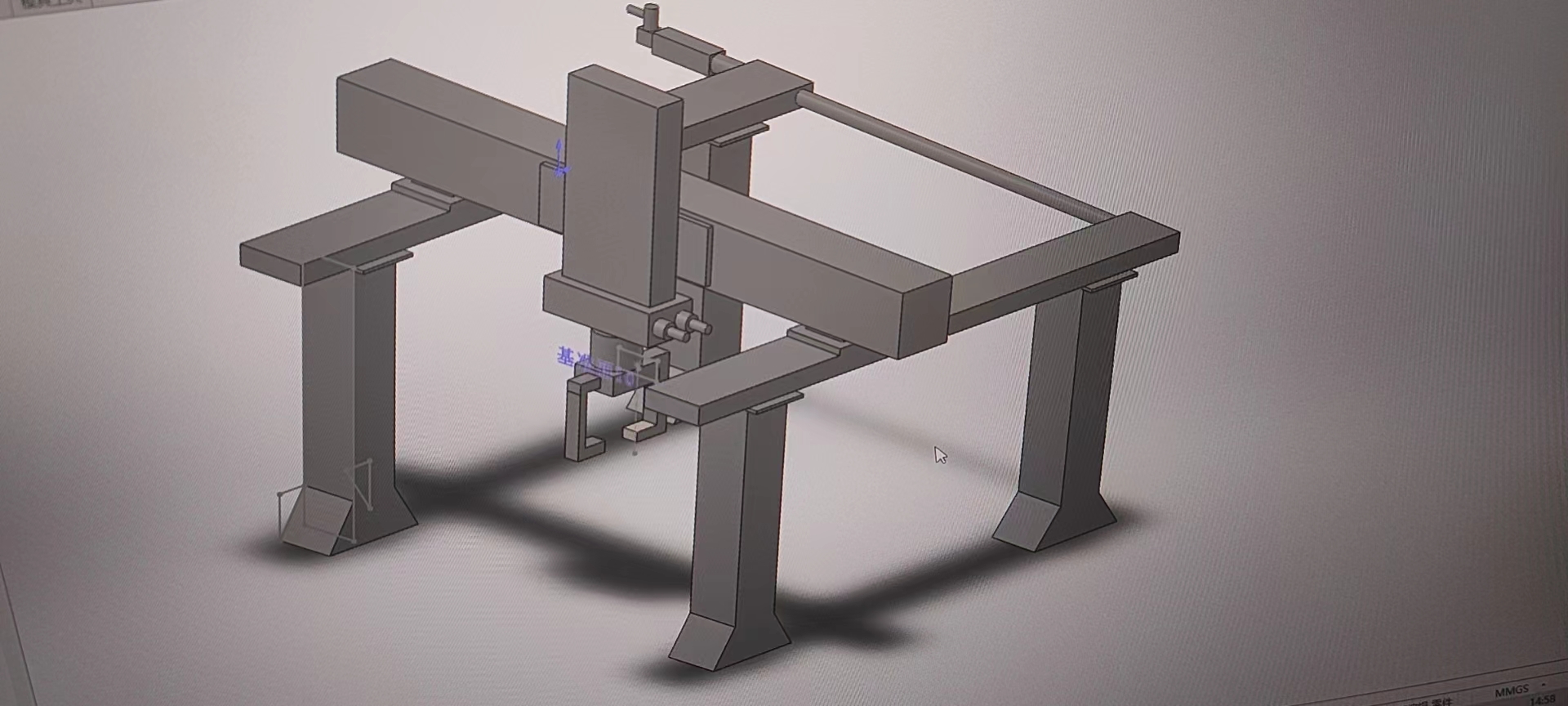
作品名称:”AJOP“自适应智能分拣起重机
学校名称:内蒙古民族大学
参赛队伍:嬴凝
参赛学生:王洪泰 陈天宇 郭浩然
指导老师:范晓静 陈雪艳



