
大赛作品详情
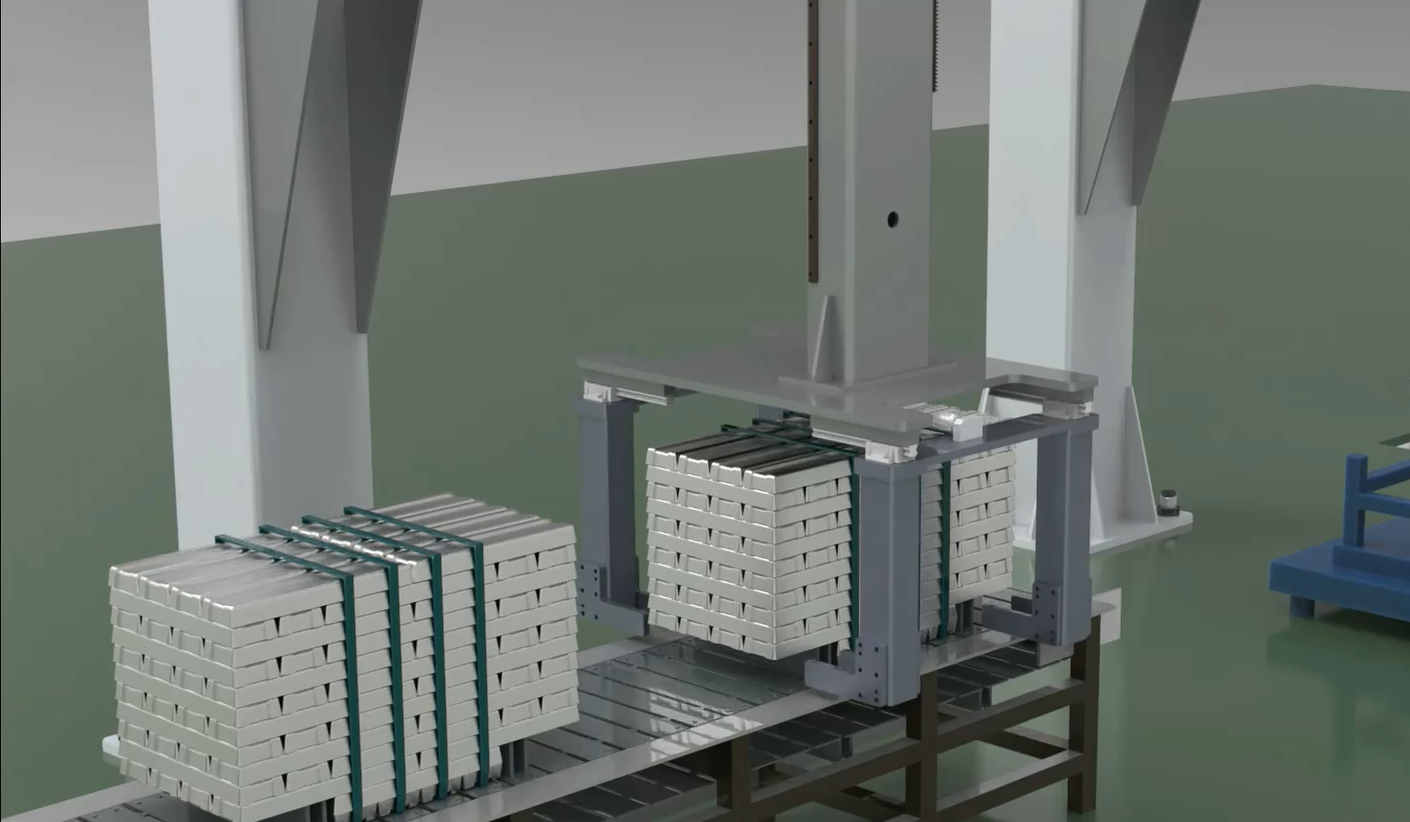
作品名称:锭垛桁架机器人设计
学校名称:湖南工业大学
参赛队伍:屠龙勇士队
参赛学生:张贤 梁毅轩 喻锦阳
指导老师:张勇 刘水长


