
大赛作品详情
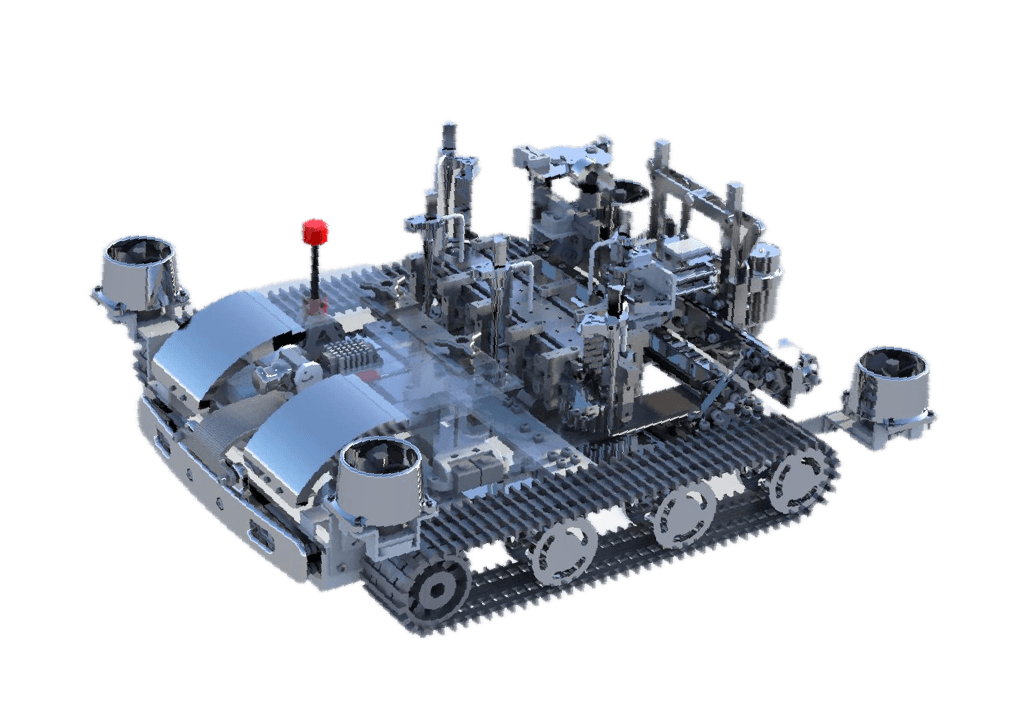
作品名称:海底珊瑚修复机械
学校名称:四川航天职业技术学院
参赛队伍:守瑚
参赛学生:冯杰 汤举有 赵健植
指导老师:卿四广 彭世能


