社会背景
现如今水下机器人是工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器。水下机器人主要运用在海上救援,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。在军事斗争中,随着无人地面战车、无人飞机和无人舰艇等逐渐在战场上显示出越来越高的作战效能, 无人化作战平台将在未来现代化战争中发挥重要的作用。
同时,据行业调查分析,2020年我国水下机器人市场总值约为580.65亿元,其中资源勘查类、安全检测类、搜索救援类以及商业应用的市场规模位列前四,分别为241.5亿元、194.3亿元、68.3亿元、63亿元。我国近年不断加大水下机器人研发投入,已成为全球水下机器人产量最多的国家;销量也位列前茅,占据全球25%以上市场份额。在发展智慧海洋的战略助推下,我国对水下机器人的需求仍将扩大,预计至2025年还有2-3倍的增长空间,市场潜力正在不断释放,未来前景广阔。
然而我们的团队通过问卷调查,企业走访,网络相关资料查询等方式。发现了一系列多轴水下机器人面临的行业难题与痛点。
解决方案的思考
(一)智能水下机器人的智能控制技术
智能控制技术是为了提高智能水下机器人的自主性,在复杂的海洋环境中完成各种任务,因此研究智能水下机器人控制系统的软件系统、硬件系统和控制技术具有十分重要的意义。 智能控制技术的体系结构是人工智能技术与各种控制技术的集成,相当于人脑和神经系统。
软件系统是智能水下机器人的整体集成和系统调度,直接影响水下机器人的智能水平。 它涉及到基本模块的选择、模块之间的关系、数据(信息)与控制流、通信接口协议、全局信息资源管理和总体调度机制。
该体系结构的目标应与水下机器人的研究任务相一致,是提高水下机器人智能水平(自主性和适应性)的关键技术之一。 不断完善和完善系统结构,增强对未来的预测能力,提高系统的前瞻性和自主学习能力。
(二)水下机器人的导航技术和通讯技术
水下导航(定位)技术:
对于智能水下机器人导航系统,如惯性导航系统、重力导航系统、海底地形导航系统、地磁场导航系统、重力导航系统、长基线、短基线和光纤陀螺仪、多普勒计计算系统,由于价格和技术,光纤陀螺仪和多普勒计计算系统一般从价格、规模和精度都能满足水下机器人的要求,加大了国内外的努力。
通讯技术 :
为了能够有效的监测、传输信息数据、协调和回收等,水下机器人发展需要通过通讯。目前的通讯技术方式方法主要有光纤通讯、水声通讯。
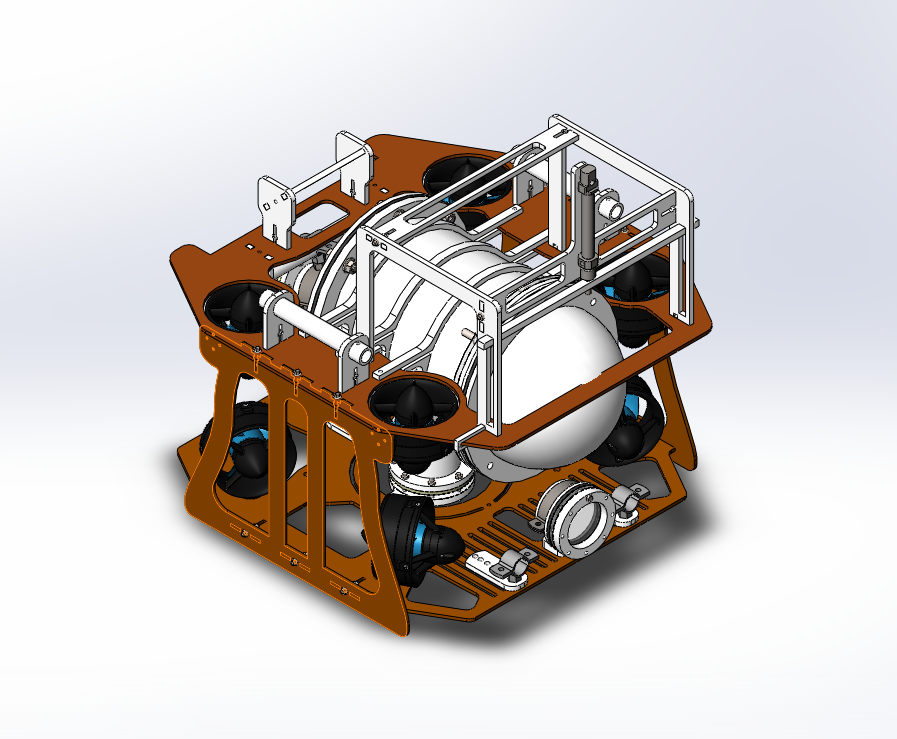
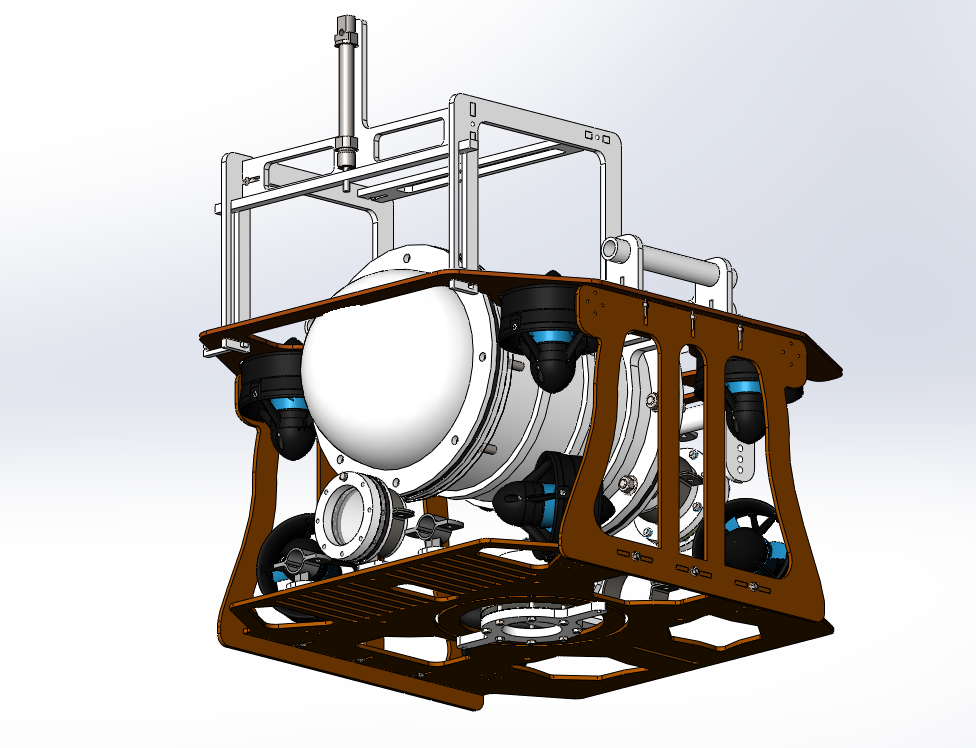
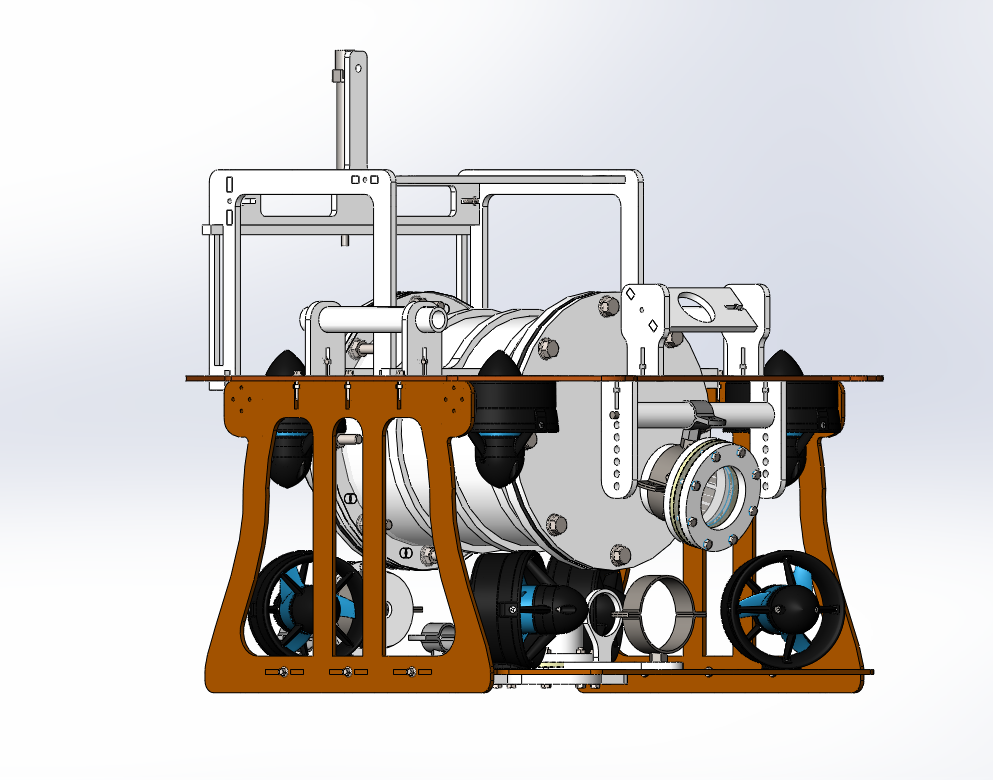
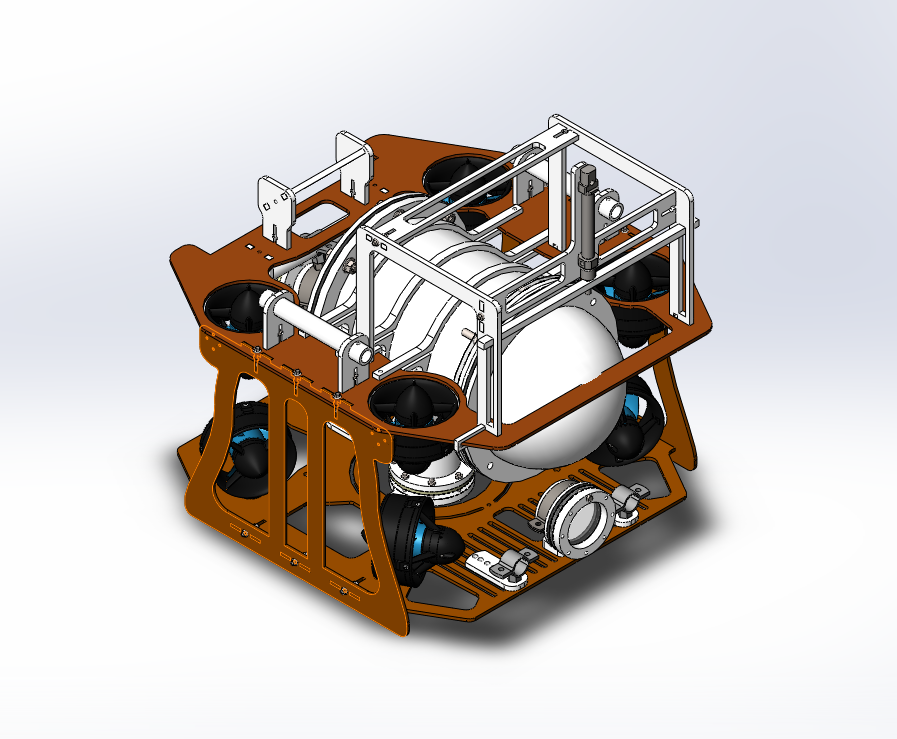
作品简介
本项目作为一个水下机器人、水下水下机器人平台,构建出一种采用轴控制,搭载动力单元冗余系统,同时具有机臂自动折叠功能的创新机构。此轴系统相比传统的水下机器人、水下水下机器人续航时间更长,同时具有更高的的安全性能。此外,本水下机器具备机臂自动折叠系统,在不工作时可自动折叠,节约收纳空间。以上优势可应用于众多领域例如:资源勘查类、安全检测类、搜索救援类等方面。为未来的水下器材设计提出了一种新的方案,独特的创新性在未来具有较大的开发价值。