目前,矿井救灾方式只是根据事故的类型确定救灾的方案,一般救护人员无法进入危险区域,只能通过提升绞车移动式风车等设备清除垃圾,向井下通风,然后再搜救遇险矿工这种方式危险性大,伤亡人数多,救灾周期长,往往效率低随着科技的发展,机器人将被应用到煤矿救灾领域。采用虚拟现实技术,遥控机器人进行工作,救灾机器人利用自身的优点,可实现大范围移动,能迅速找到井下遇险矿工的位置,能大大减少救生队员的伤亡和并有效加快搜救速度,对提高救灾效率具有重大意义。在当今社会,研究有自己特色的救灾机器人,无疑具有巨大的社会效益和经济效益。就目前存在的井下机器人来看,救灾机器人在用途上可分为两类:环境探测机器人和营救机器人。环境探测机器人探测、采集、发送矿井灾害环境参数和信息,包括瓦斯、CO、02、温度和其他灾害特征气体等,以及生命、图像等信息,为地面决策者提供相关信息,这类机器人体需要积较小,灵活。营救机器人是要将受伤矿工转移到安全的地方,需要很大的力量,体积需要较大。目前矿井营救机器人还没有开始研发,主要是研发矿井探测机器人。而所谓救援探测机器人,就是对灾害环境进行探测并对探测到的生命进行一定救援帮助的机器人。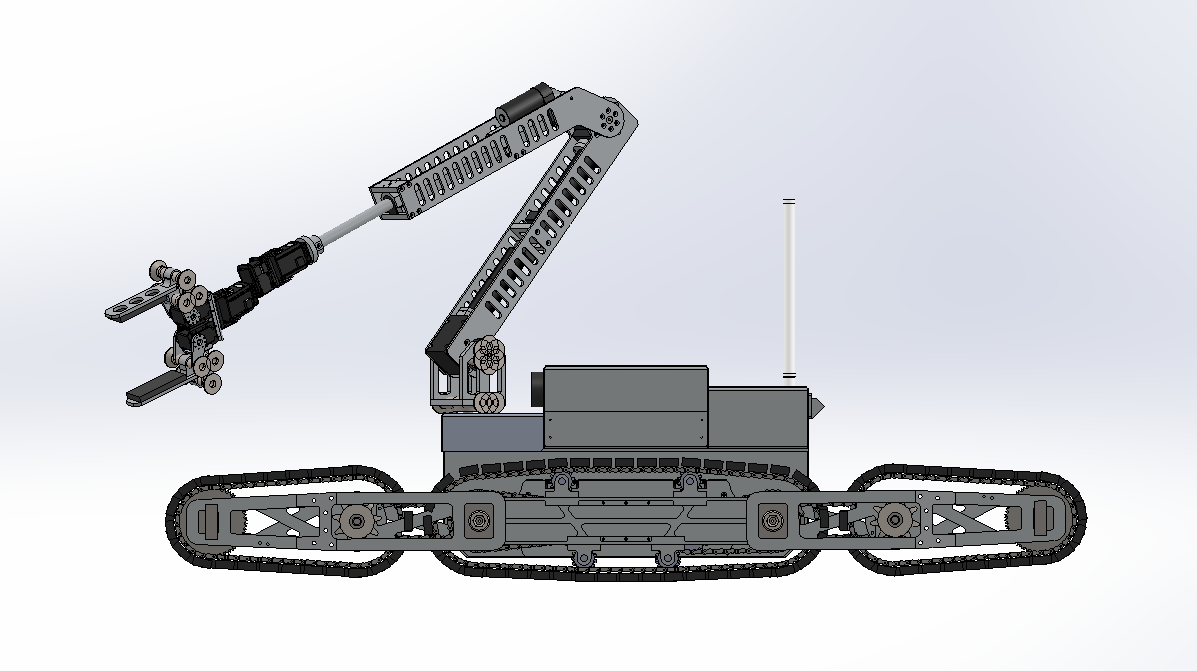
1、矿井机器人本体所需的各种材料及技术问题;
2、矿井机器人控制问题;
矿井机器人是在矿井移动,具有类似坦克的履带,其本身就是一个履带的系统;由于在矿井中运动,采用履带电力推进。这一切使得控制问题变得很困难,特别是要求在定点进行作业时,上述原因造成在零速时的“零增益、零阻尼”现象,使得动力定位控制系统的刚度很难满足定点作业的要求。这是一个有待研究的问题。
3、矿井机器人的通信问题;
1)采用无线网格网(Mesh和WIFI技术),提高了整个系统的可靠性,智能多路由技术解决了单点故障对系统的不良影响;
2)无线双频技术支持12跳无线组网,辅助于光纤通信后,传输距离大于20KM,实现了井下灾害区域、井下安全区域、地面指挥中心整个通信通道的贯通;
3)便携式设计,免配置组网,易于携带与快速布放;
4)高带宽传输与接入能力,具备多路移动通信、无线高清视频、无线传感器接入功能;
5)基站、终端均具备大于8小时的电池连续工作时间;
6)配套通信终端完备:智能一体化对讲安全矿帽、三防智能本安手机、便携式本安无线摄像机一、本安平板计算机、指挥系统平台等。
7)支持卫星通信、集群通信、短波通信、公网传输以及智能手机接入,可以实现从事故现场到企业集团乃至相关政府部门的“横向多部门、纵向多层级”的广域网°联合通信指挥;
4、矿井机器人的能源、井下4K拍摄问题;
矿井中的地形和温度湿度,阻力越大耗能越多,所以电池续航能力是矿井机器人的一大短板。对于画质的追求从未止步,从标清(720p)、高清(1080p)到超高清(4K),短短几年视频分辨率一路攀高,大有“高像素=画质好”的势头。4K分辨率有多高?网上说法是:4K分辨率是1080p的4倍,是720p的9倍,物理分辨率为3840*2160像素。
高分辨率的最大优势是分辨率越高,画质越细腻,能给人极致的视觉享受和舒适的观看体验。但是4K拍摄存在诸多瓶颈,抛开4K拍摄的单反和手机不说,仅从矿井水下机器人的角度探讨4K拍摄的研发难度。
作品简介
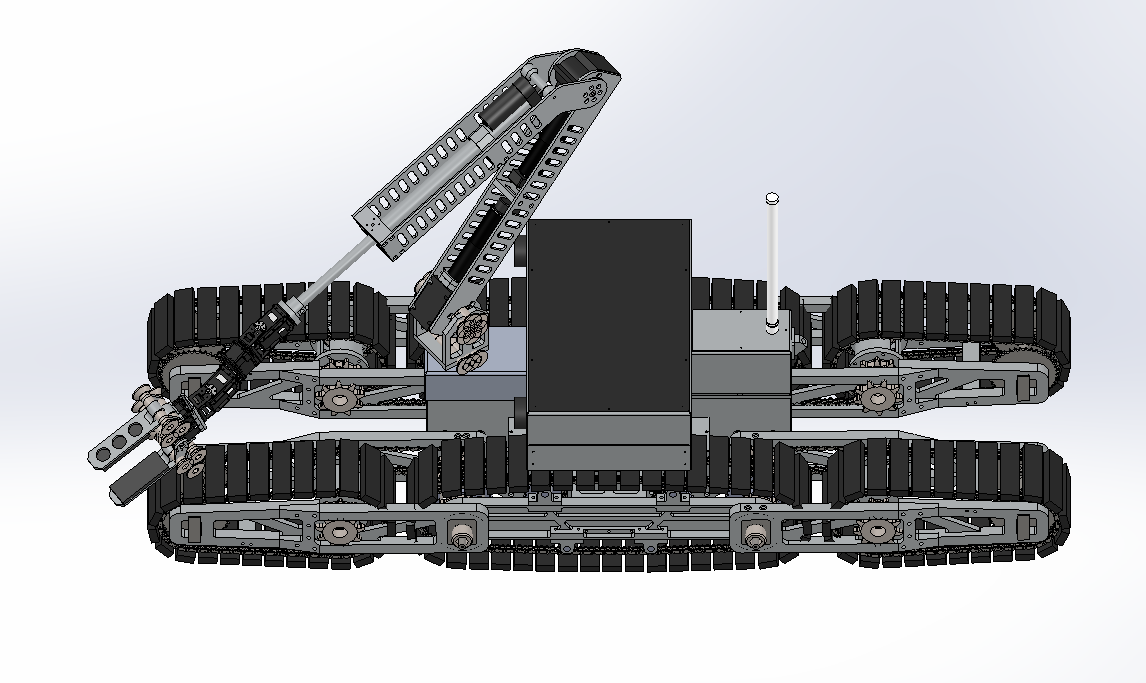
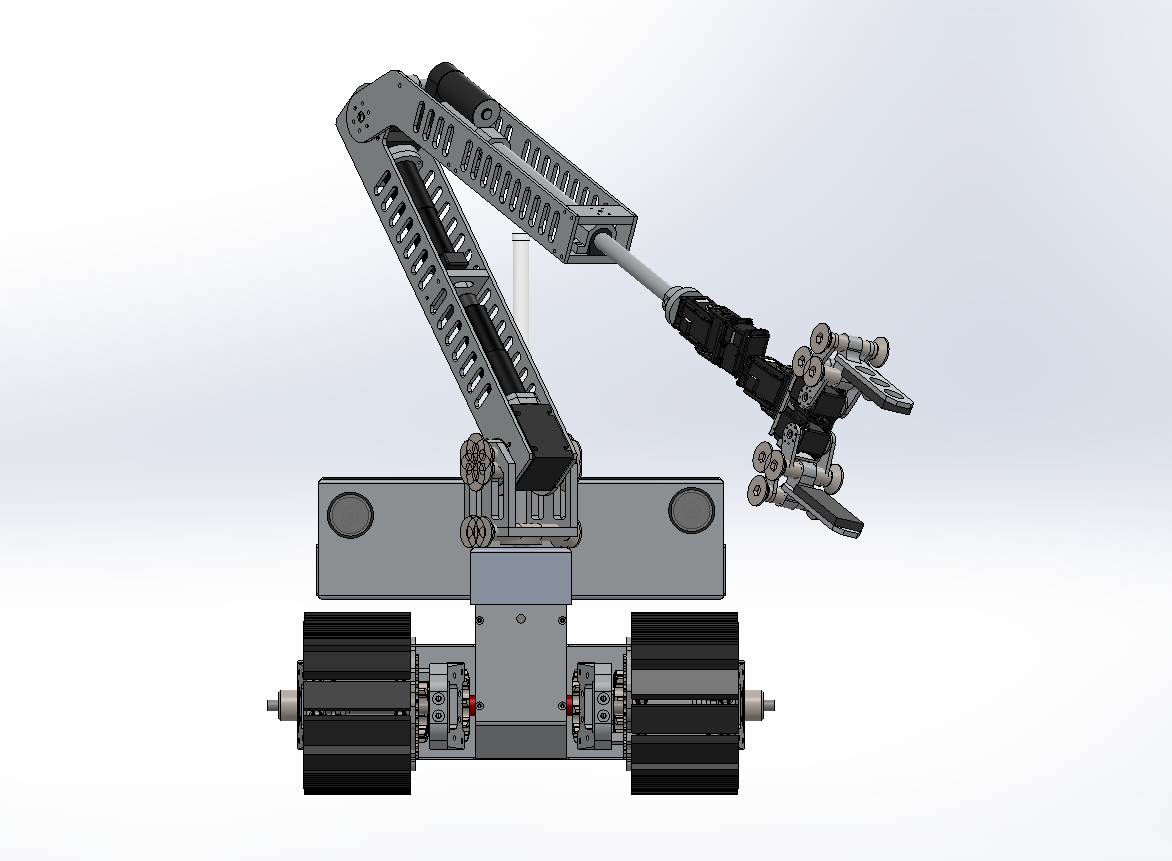
本项目作为一个矿井救援机器人、矿井机器人平台,构建出一种采用轴控制,搭载动力单元冗余系统,同时具有机臂自动折叠功能的创新机构。此轴系统相比传统的矿井机器人、改进后的机器人续航时间更长,同时具有更高的的安全性能。此外,本矿井救援机器人具备机臂自动折叠系统,在不工作时可自动折叠,节约收纳空间。以上优势可应用于众多领域例如:资源勘查类、安全检测类、搜索救援类等方面。为未来的井下器材设计提出了一种新的方案,独特的创新性在未来具有较大的开发价值。
作品创新点
(1)长续航
目前,大多煤矿采用的是充电式煤矿皮带巡检机器人,存在最大的问题就是电量续航不足,这不仅限制机器人的巡检距离和时间,而且在遇到主斜井坡度较大时爬不上来。即使巡检完成一次还需充电4个多小时,不能实现24小时不间断巡检。使得巡检机器人的实用性、实效性大打折扣。
该方案的主要优点一是通过PLC、变频器自动化控制实现软索(钢丝绳)牵引巡检机器人,巡检机器人自身电量不再用于机械行走,仅用于自身传感器供电;二是巡检机器人具有自发电功能,在软索牵引其行走时,可以将机械能转化为电能,用于《检机器人自身消耗,无需外部充电、无需更换电池。
该方案更加实用、实效,不仅彻底解决了续航不足问题,使智能巡检机器人能实实在在用起来,真正实现了24小时不间断巡检,更重要的意义在于具有很强的推广性。
主斜井巡检机器人搭载高分辨率摄像机、烟雾传感装置、红外温度传感器等,可实时采集、存储、传输作业现场的图像、声音、温度等数据,对数据进行分析,及时判断出设备故障和位置,发出报警信号,如:托棍温度过高报警、皮带与皮带架摩擦温度过高报警等信息,通过系统预警信息多次指导运输队检修,实现将智能巡检与指导检修相结合,为该公司向着“少人则安,无人则安”的智能矿井建设奠定了坚实基础。
(2)安全多冗余
多轴系统其独特的动力冗余系统。相比于传统的井下机器人,以往水下平台的最大劣势是不具备安全冗余能力,若机器人某台电动机发生停机,机器人将会失去动力。为了解决上述缺陷。本运动平台将两台电动机以串联的安装方式作为同一个动力单元,在一侧某台电动机因以外发生停机等故障时,井下控制系统将监测到动力系统异常,将自动补偿故障动力单元的动力输出,从而迅速稳定机器人姿态。给操作员更多操作的机会。