
大赛作品详情
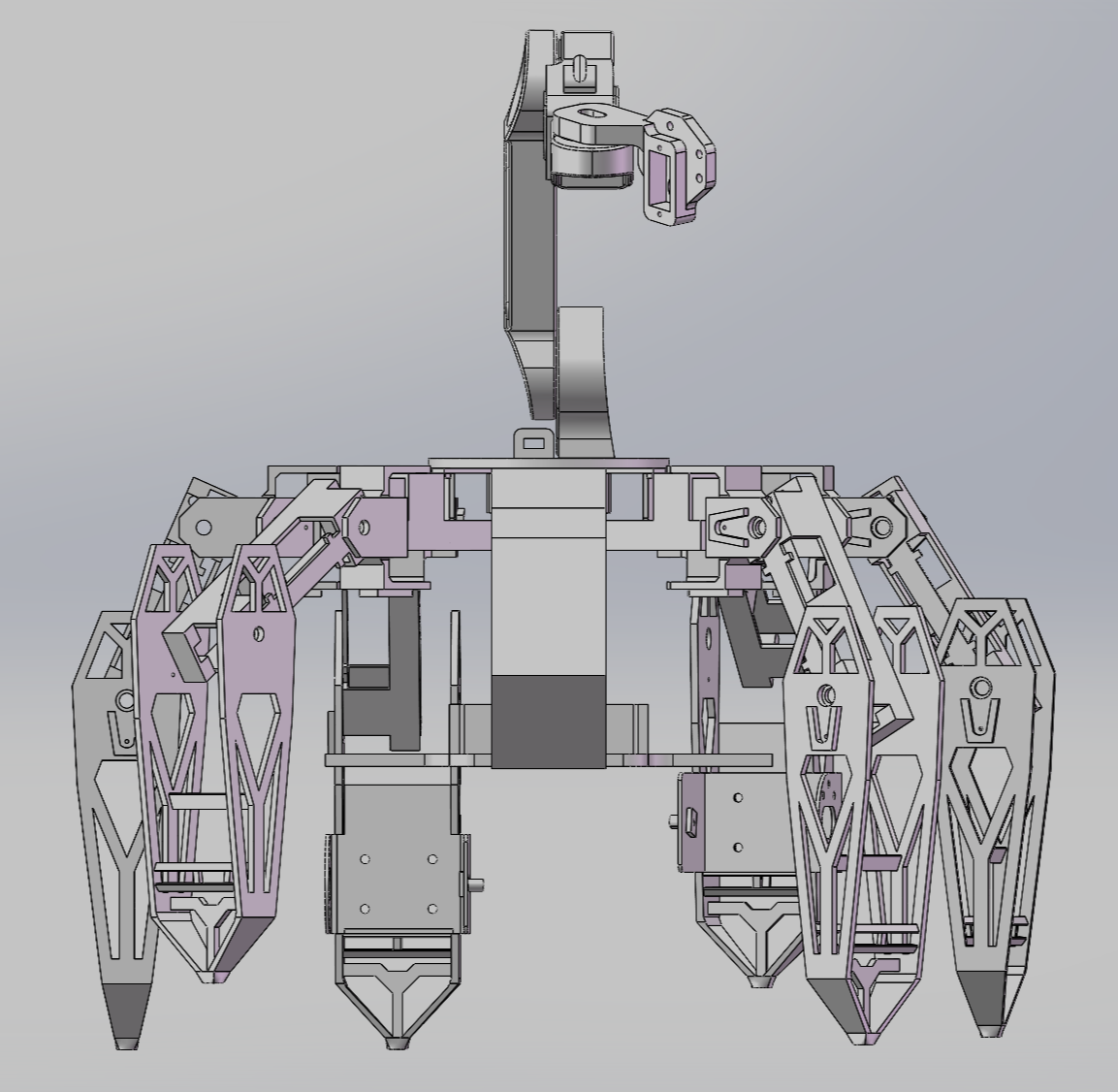
作品名称:仿生探测六足
学校名称:长春电子科技学院
参赛队伍:我是大哥
参赛学生:崔庭瑄 王禹博 相警杰
指导老师:李秀峰 吴欣宇


