
大赛作品详情
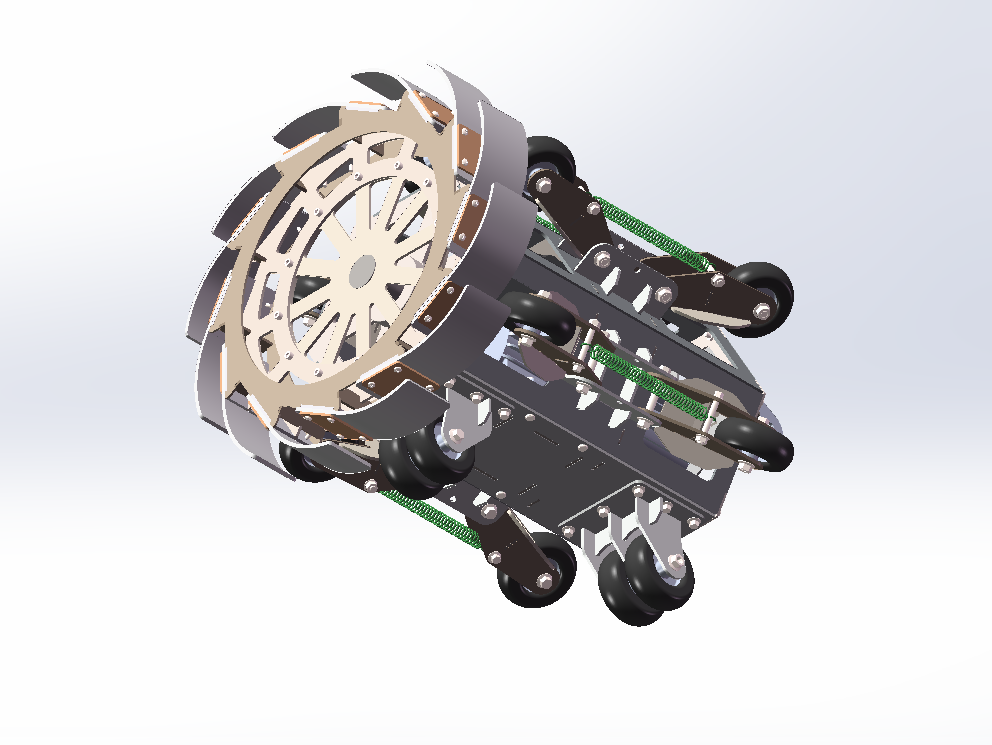
作品名称:管道清理机器人
学校名称:湖南工业大学
参赛队伍:奥特曼兄弟
参赛学生:张海兵 杨阳 瞿银
指导老师:余江鸿


