
大赛作品详情
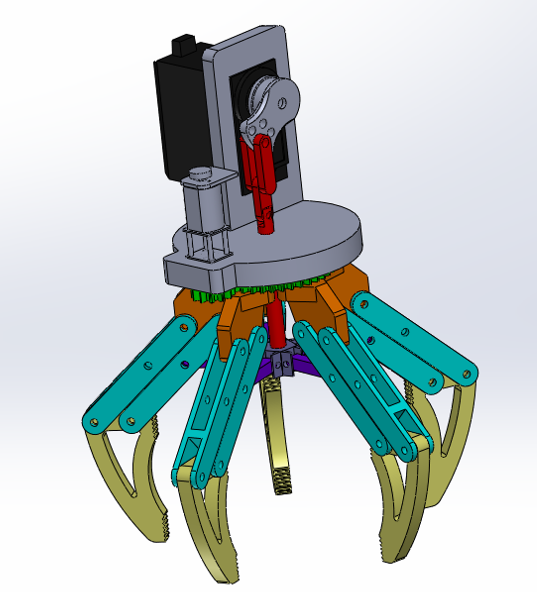
作品名称:可穿戴式仿生抓取手
学校名称:长春电子科技学院
参赛队伍:玛卡巴卡队
参赛学生:牛超 赵欣 卢尚阳
指导老师:刘效含 孙诣博


