1.1社会背景
全球科技革命正在加速发展,综合国力与产业竞争日渐激烈。农业是国家的基础,没有农业农村现代化,就没有整个国家现代化。农业的根本出路在于机械化、自动化、智能化。近年来,中国农业机械化水平持续增长,但总体上仍然落后于发达国家,存在发展区域、作业环节、不同作物间发展不平衡,先进技术推广及技术集成配套应用发展缓慢等现实问题。为此,大力推进农业机械化、自动化、智能化发展具有十分重要的现实意义和战略意义,也是建设农业强国和创新型国家的重要前提。图1.1 给出了近几年中国农作物耕种收综合机械化率统计情况及预测情况。
其中现代农业方面最具代表性的就是智能巡检,然而我们的团队通过问卷调查,企业走访,网络相关资料查询等方式。发现了一系列传统农业巡检面临的行业难题与痛点。
1.1.1难以解决的农业难题
(1)体积过于庞大
传统巡检车尺寸普遍过大,过于笨重。
任何检测车对灵活性都特别敏感,多一点就会使经济性变得很差。如果一款检测车是四轮或六轮,而且检测器的机械臂位置固定,则无法有效利用其空间优越性,而其过多的机臂就变成了“死重”。这些死重会造成续航里程短,还会造成其载重能力差,浪费停放空间等
(2)单个指标检测繁琐
传统田间各项环境指标检测均由人工单独测定完成,对田间区域指标数据记录繁琐,效率低下,并且容易出现数据处理失误,耗费大量人力物力成本即使耗费大量时间,也难以做到无死角监测,农业科技与农业生产活动容易脱节
(3)对地域差异适应性弱
我国国土面积约960万km2,幅员辽阔,为农业发展提供良好基础。但同时地域差异,导致各地农业发展水平各不相同。这种现象并不利于现代农业的健康发展。我国各个地区之间的地形地貌、土壤成分、生态气候等,都存在较大差异,种植的农作物各不相同。所以在应用农业巡检车时,检测效益也不相同。传统巡检车难以适应不同地形,而且重力产生的车辙造成农田土壤透气性差,对植株伤害大。
(4)功能单一,无反馈机制
传统巡检车不具备多功能性,无法解决多种复杂问题。
市场上的传统巡检车一般只能执行一种任务,如只能识别虫害任务,却不能执行驱虫任务,无反馈机制,不能及时处理田间灾害,不成调节系统。
1.1.2解决方案与思考
(1)增加立体,减去冗余
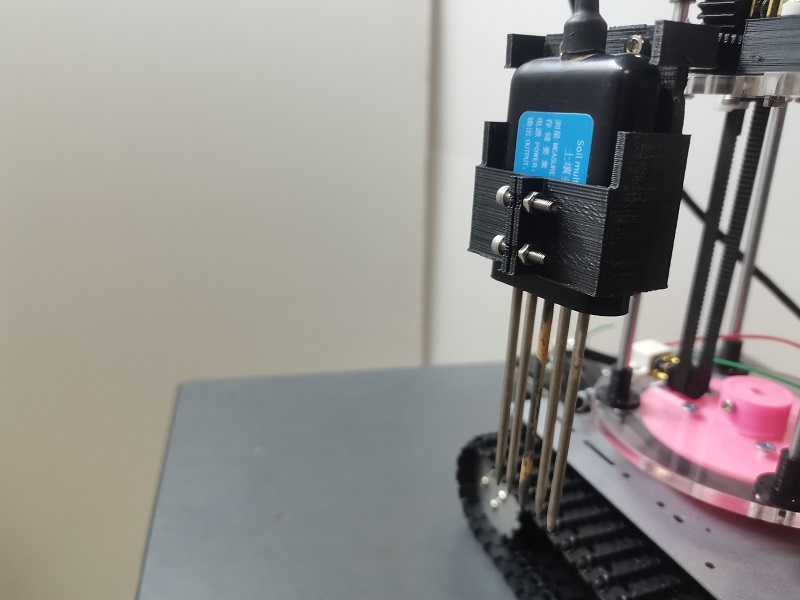
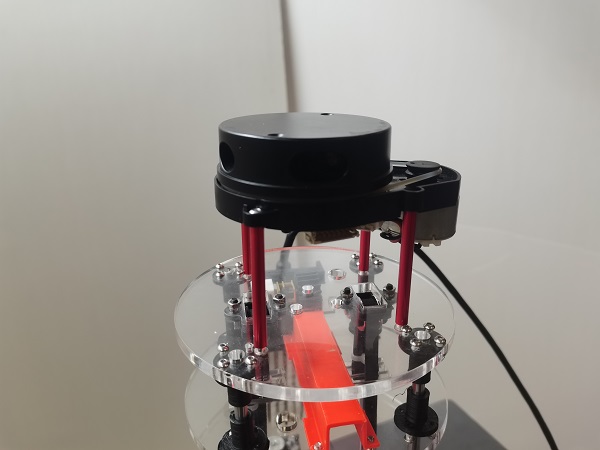
将传统单层式检测车改为双层式,缩小小车空间体积,且第二层能够灵活转动,各部分分工明确。减去多余载重,使用轻质小型的传感器,减去冗余机械臂,留下两只需要引导插针式传感器的机械臂,从而为小车减负。
(2)同步检测,云端统计
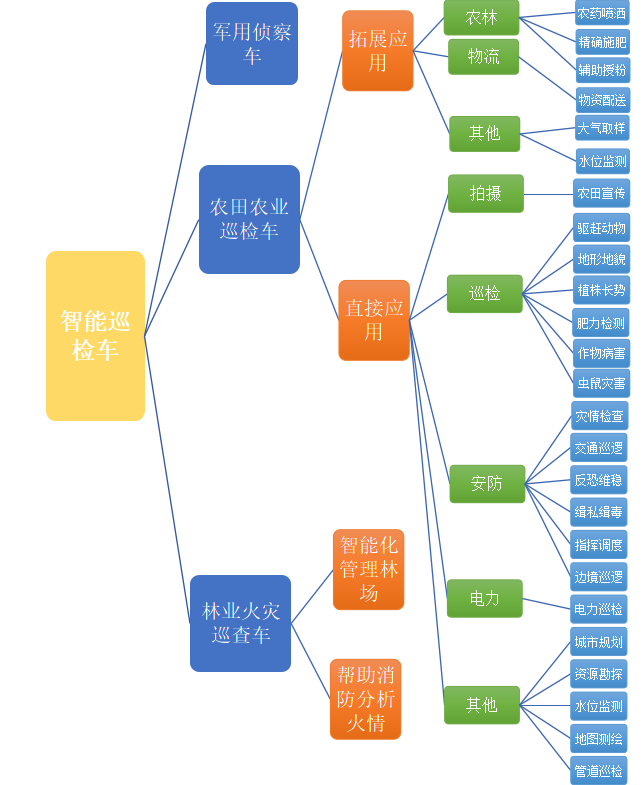
本巡检车搭载多种检测器,传感器。且装备有氮磷钾、PH、土壤电导率、三项于一体的综合监测器,能同一时间收集多种环境指标数据,极大缩短收集时间,免去繁琐操作,使检测任务更加高效便捷。再通过Esp8266模块将收集到的数据上传至云端统计,实时发送至使用者的移动设备上。图1.2 给出了设计框架。
(3)改用履带式底盘
履带式轮胎使用范围广,结构简单,传动平稳,操作省力,易实现自动化控制。其爬坡能力强,不仅适应平地,也适合山地,其转弯半径小,机动灵活,且适用于沼泽、河滩、沙漠、水田、热带雨林、雪地和冰面等杂乱的路况,尤其适应狭窄场地。而且履带车压痕较浅,对植株土壤透气性影响较小。
(4)设计反馈机制
本巡检车搭载各项检测器的同时,还联合配备有小滴灌技术,实现精准驱虫和补给肥料,检测后,上传至云端分析,检测车对植株下方喷头进行开启和关闭达到施肥等作用,将采集的数据配合一体化水肥系统,对每一株植物进行合理用肥用药
1.2技术发展背景
现代农业机械自动化技术的有效创新。近年来,我国综合国力不断提升,现代农业建设脚步也越来越快。为满足农业发展需求,不断优化农业机械自动化技术。在农业机械自动化生产中,我们团队运用信息技术,提升农业发展水平。例如视觉技术,这一技术可以将人视物的状态模拟出来。并借助人工智能、物理建模、yoloV5图像处理等技术,闭环反馈控制技术准确识别农田外界的环境,实现远程监控的目的。借助这些技术,农民即便没有亲临田地,也能够顺利开展农业生产活动。极大的节约人力成本,提升生产效率。二 作品介绍
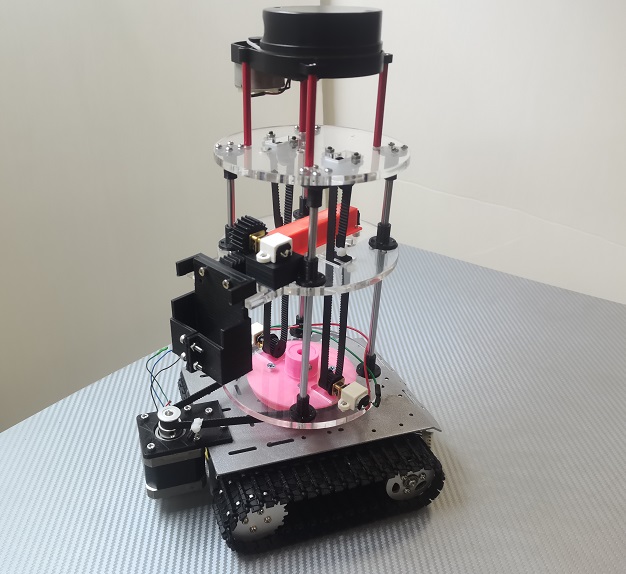
本团队是隶属于武汉东湖学院的创新工艺社团队,根据多年的研究,以及多篇有关于自动化农机、智能管理的研发算法、外形设计的博士硕士论文,再结合本团队研发的缩小比例模型、推导的pid算法控制结果,提出了新一代智能农业巡检车平台的创新型设计与应用方案。其实物图如图2.1所示。
2.1作品简介
本作品为一种现代农业智能巡检车,其包括车体和操作车体运动的移动设备;车体上设置有与驱动轮相连接的直流电机,直流电机通过电机驱动器和正交编码器与设置在车体内的主控制器相连接,车体上设置多种检测器和两只机械臂,机械臂由皮带传动升降如下图2.2所示。![CN%RLZ6{(V)]TTWY5_9BEM5.jpg](//wqqx2020.oss-cn-beijing.aliyuncs.com/fpouS2VBQivpOPKvYwQOsWKAXQLWWxR4ea5BGgPR.jpg)

![CN%RLZ6{(V)]TTWY5_9BEM5.jpg](http://wqqx2020.oss-cn-beijing.aliyuncs.com/fpouS2VBQivpOPKvYwQOsWKAXQLWWxR4ea5BGgPR.jpg)





