大赛作品详情
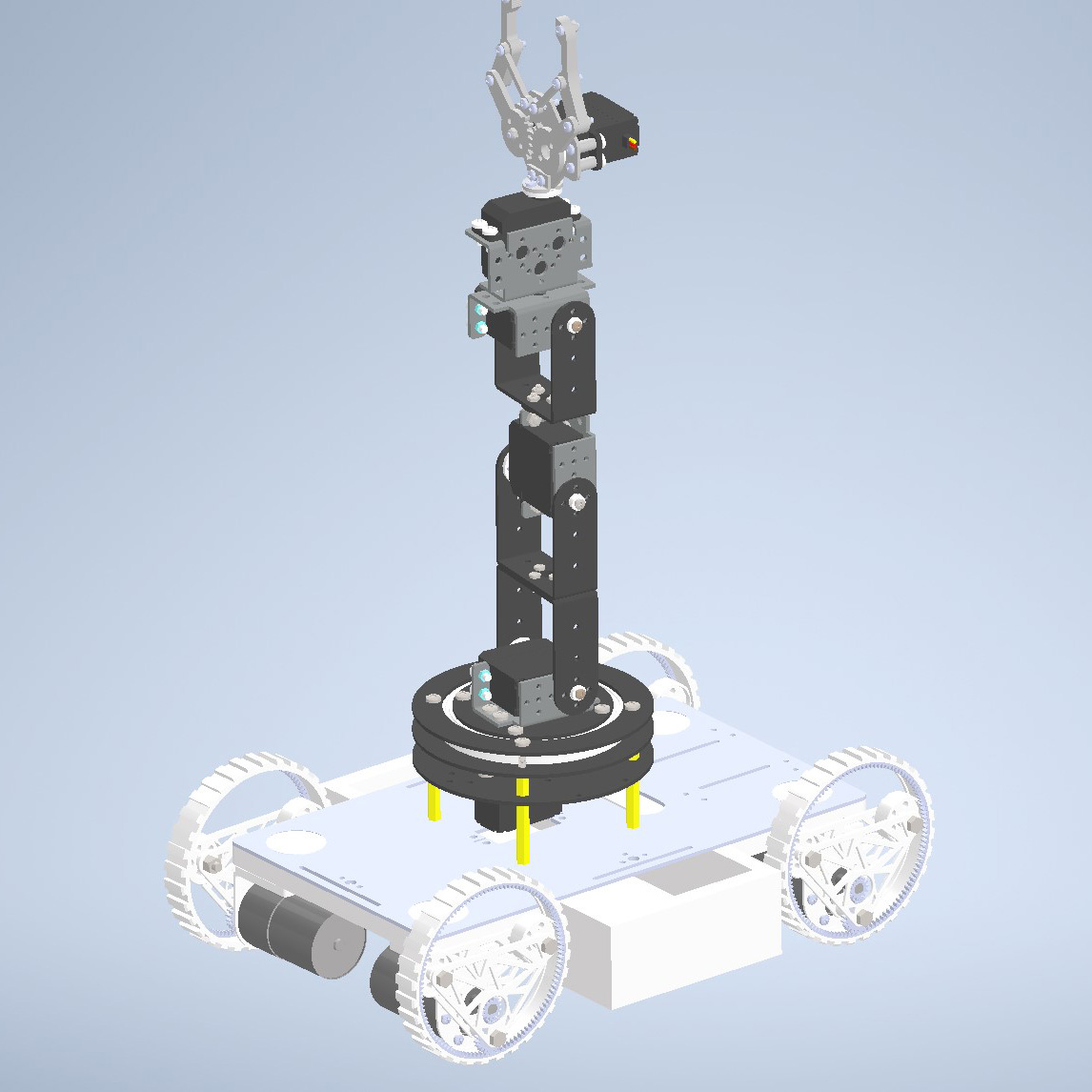
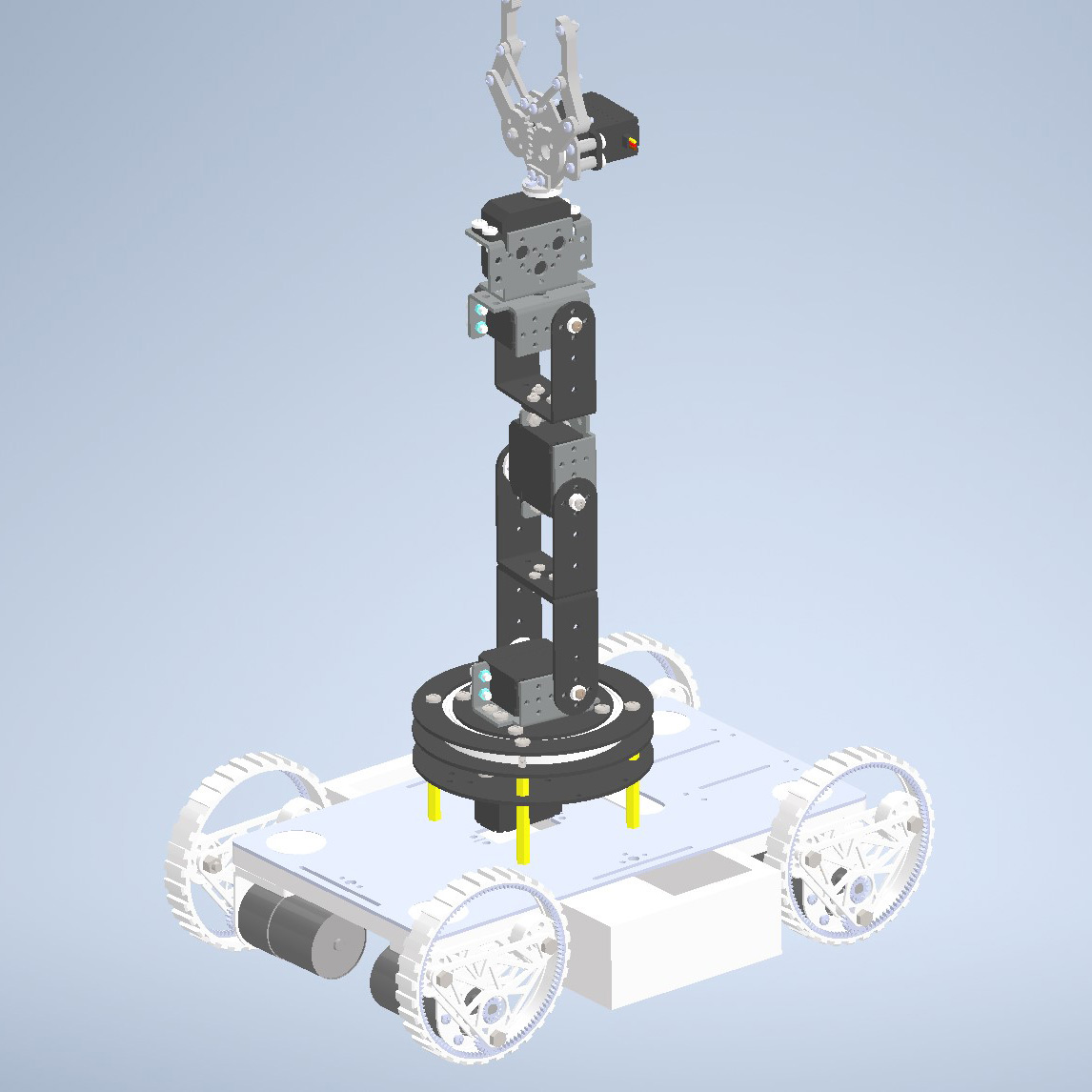
作品名称:应用于家务劳动的智能搬运机器人
学校名称:哈尔滨工业大学
参赛队伍:HitRobot
参赛学生:胡安玉龙 杨成钰
指导老师:林森