
大赛作品详情
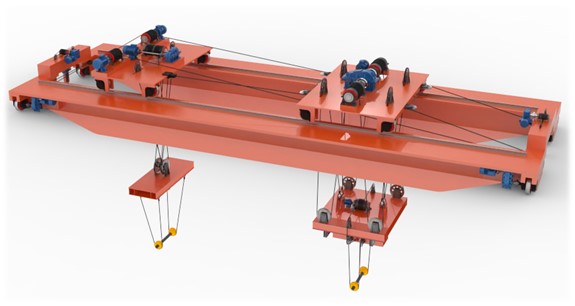
作品名称:重型机械智能臂架装配吊运专机
学校名称:湖南工业大学
参赛队伍:勇士队
参赛学生:张瑜辉 毕晓伟 向立
指导老师:张勇


