一、研发背景
智能搬运机器人是移动机器人应用拓展方面的重要成果,在自主移动的基础上,搭配货舱、机械臂、机械托盘、机械抓手等方式做物品搬运工作,在物流园、图书馆、码头和机场等场景,具有作业量变化大、工作强度高、工作流程调整频繁的特点,技术升级的智能搬运机器人在自动化、智能化和柔性化的特性能够很好的满足这些场合的搬运要求,而随着智能搬运机器技术水平不断发展,搬运工作慢慢进入到小型复杂场景,如餐厅、诊所、小型商场、快递分拣点等,其中县、镇级别的快递分拣点,有明确的物品分拣需求,但又不适合采用大型流水线方式做物品分拣,想要实现机械代替人工作业,最适合的就是小型自主作业的智能搬运机器人。
二、结构设计说明
搬运机器人整体使用STM32F103C8T6芯片搭配自主设计的PCB版来控制机器人实现移动、定位、抓取、视觉功能。
(1)机器人移动模块设计:
使用4个驱动电机搭配橡胶轮和底盘作为移动模块,实现机器人前进、后退、旋转等功能。
(2)机器人定位模块设计:
基于LDS激光雷达使用SLAM算法,类似于全景照相机的摄像方式,把机器人识别到的所有障碍物,通过高度相似部分做重叠的方式,在系统内部搭建出工作范围平面地图,实现机器人首次进入工作空间时的地图搭建,同时根据搭建的地图和后期工作中识别到的地形特征点来给自身定位。
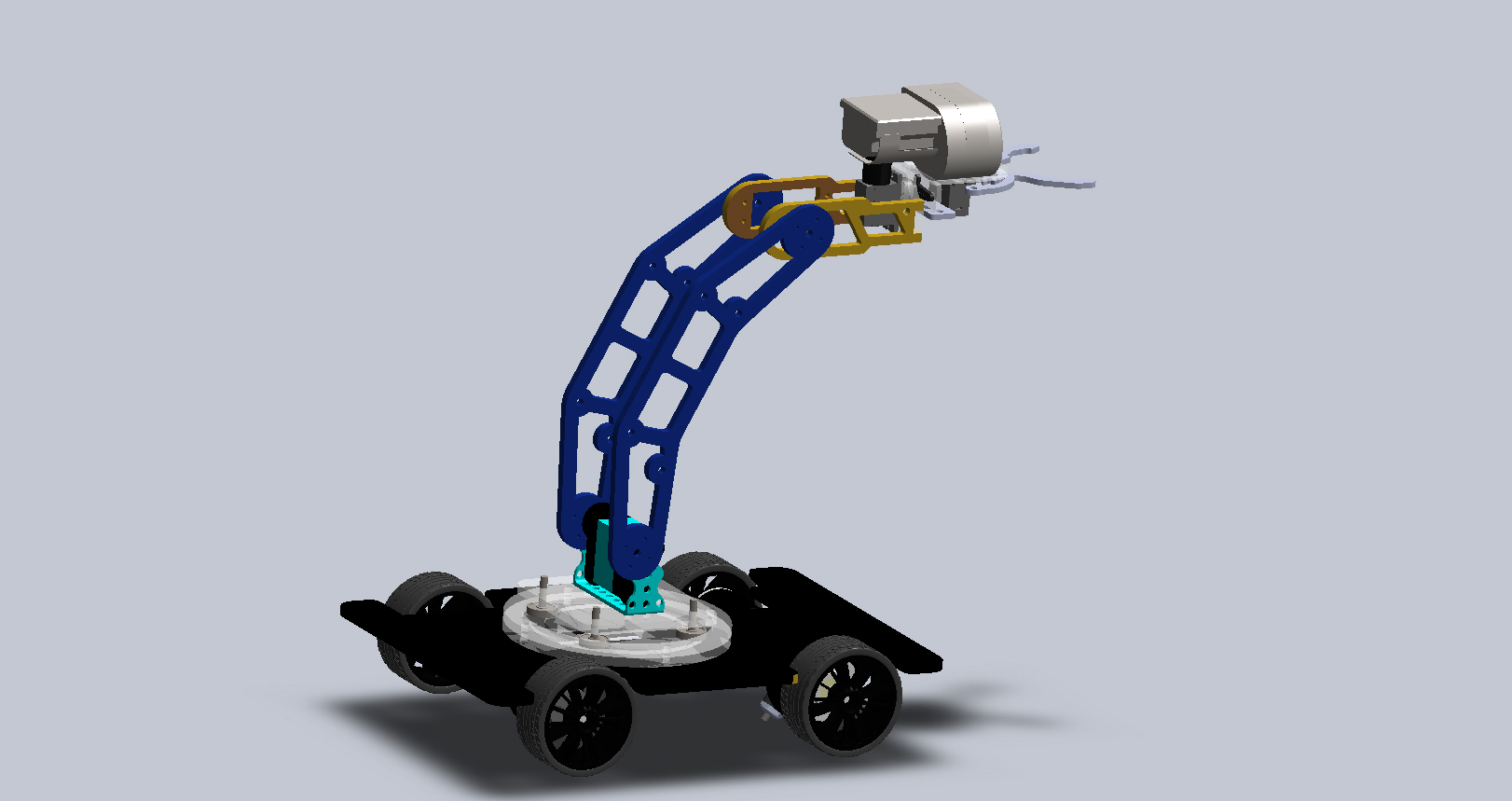
(3)机器人抓取模块设计:
基于五个可270度角转动的舵机和机械臂末端抓手,以及可360度旋转的连接底盘,实现物品抓举、放置的功能。
(4)机器人视觉模块设计:
使用opencv视觉开源工具库,结合机械臂抓手上安装的高清摄像头,实现物体及颜色识别,同时用高阶运动学方程判断物体位置,实现物体抓取,同时能识别出物体上的编码进行扫描。
三、功能与使用说明
(1)机器人主要功能:
在固定区域内能够自主移动,通过LDS激光雷达实现自动躲避障碍物和定位自身的功能,同时通过机械臂抓手处的摄像头,自动寻找需要搬运的物件,以物件身上是否有二维码或条形编码来识别是否需要搬运,通过扫描二维码的方式来分类物件,把需要搬运的物品分类搬运至提前定好的不同放置点处,完成放置后重新启动寻找程序,如此反复,完成物品分拣放置工作。
(2)机器人使用说明
搬运机器人初次使用时,要放机器人自行在工作区域内构建地图,同时提前设置分类要求和放置点以及充电点,机器人启动后不能进行人为遥控,是自主形式移动,靠搭载的设备识别物品,但需要人为方式,提前把需搬运的物品翻面至二维码朝上或朝前方向,以便机器人做识别。
四、特色与创新
特色:本机器人最终目标在于达成县、镇级别快递分拣点,快递分拣工作,自主把快递扫描后分拣到对应区域快递框内,采用自主设计的PCB板,使用STM32作为主控芯片,通过专用的电机接口配合PID算法,实现对电机的控制;通过专门留下的串口实现功能扩展;通过专用的舵机接口配合PID、高阶运动学方程实现对机械臂的控制,利用OpenCV配合摄像头来实现机器视觉。
创新:
1、有丢失目标找回功能,遇到障碍物遮挡,程序会自动搜寻目标,绕开遮挡物,找回丢失的目标继续执行分拣任务。
2、具有人机无接触安全保护功能,遇到人体等障碍物时,移动底盘会立即停止运动,算法重新设计路线,避免发生碰撞。
3、采用STM32F103C8T6芯片作为搬运机器人控制系统的核心部件其主要优点是灵活通用、可靠性高、抗干扰性强、编程简单、使用方便、接线简单、功能强、体积小、重量轻、易于实现机电一体化。
4、采用差速驱动机械机构简单提高了传动的效率和控制的灵活性。
5、小型自主作业机器人的实际应用,对标工作场景明确,在固定范围下做物品搬运分拣工作,解放部分人力劳动,例如物流领域,全球市场庞大,单国内有需求的县镇级分拣点在3000个以上,能够提供超过1000个生产制造及维护岗位,为推进社会生产智能化做贡献。