
大赛作品详情
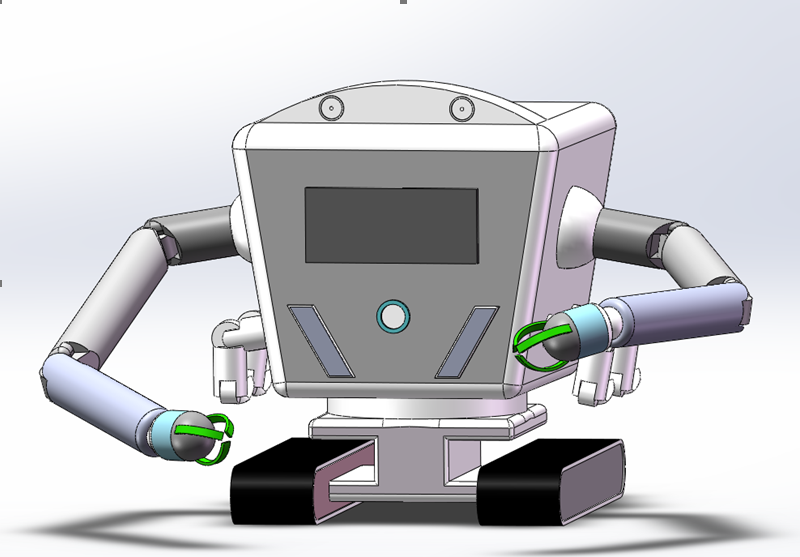
作品名称:水下垃圾清理机器人
学校名称:巢湖学院
参赛队伍:陌
参赛学生:韩梦乐 倪小强 毛家齐
指导老师:王玉勤


