
大赛作品详情
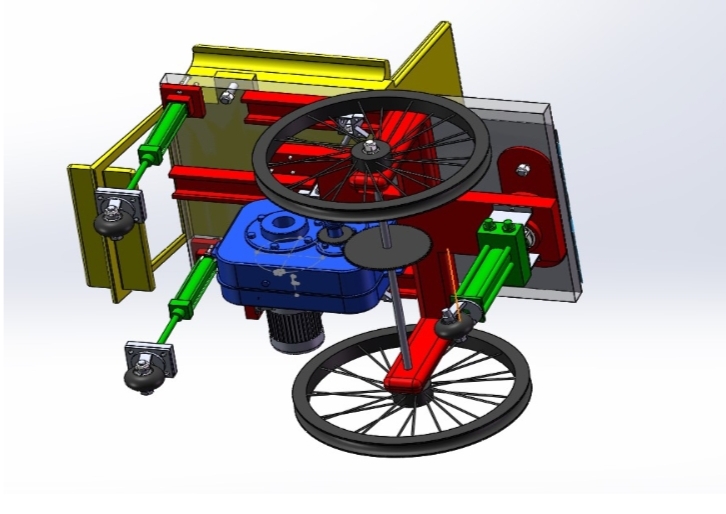
作品名称:全自动爬楼机械轮椅
学校名称:兰州工业学院
参赛队伍:翱翔者
参赛学生:焦妍宁 朱鹏波 刘娜娜
指导老师:芦强 李钰龙


