
大赛作品详情
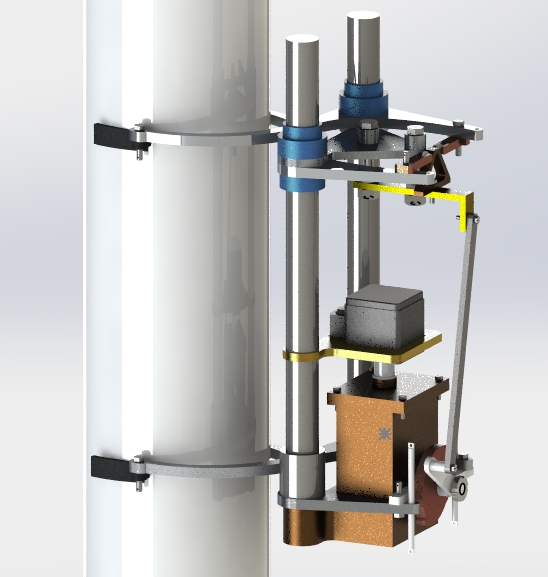
作品名称:新型爬杆机器人
学校名称:兰州工业学院
参赛队伍:致行
参赛学生:毛鑫 张辉 王娜
指导老师:李钰龙 梁泽芬


