
大赛作品详情
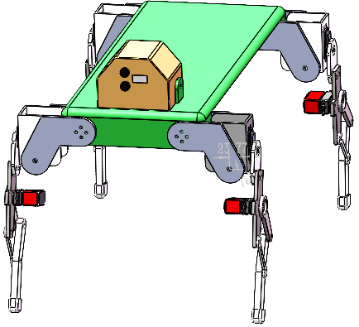
作品名称:基于单片机技术的仿生机械狗的设计
学校名称:湖南城市学院
参赛队伍:基于单片机技术的仿生机械狗的设计
参赛学生:蔡忠航 周文雪
指导老师:肖白军 彭利


