开发背景:外骨骼是一种具有拟人化配置的可穿戴动力型机器人,融合了机电技术、生物学、自动控制、人工智能等多个领域的学科知识。外骨骼的研究始于20世纪70年代,依据助力方式的不同,外骨骼可分为上肢外骨骼和下肢外骨骼。下肢外骨骼主要是针对人体行走助力的外骨骼,其主要包括适用于健康人体的运动增强型外骨骼和应用于患有运动障碍人体的辅助型外骨骼。2013年由美国哈佛大学提出柔性外骨骼的设计理念,其主要作用是辅助士兵负重行走,减少非作战场景下体能消耗,延长士兵的作战时间,使用柔性的基底材料,相比于传统的刚性外骨骼,重量减少且便于穿戴。 Alan T. Asbeck等人(2014)提出基于线缆的电驱动柔22性外骨骼,采用电机驱动,位置控制更精准,通过背包上电机驱动柔性绑带产生拉力,在髋关节和膝关节安装支架,将行走的步态模式划分为支撑相和摆动相,支撑相受力大,需要较好的启动稳定性,摆动相速度快,需要快速的响应性,柔性外骨骼上安装的力传感器将信号发给嵌入式控制器分析人体运动状态,从而选出不同的控制模式。何崇伟(2018)设计了人工气动肌肉助力髋关节和膝关节的柔性外骨骼,该设计采用气动装置为关节助力,但整个装置并未实现便携式。曹品(2021)设计的气动人工肌肉的柔性下肢外骨骼,提升外骨骼助力行为的自适应性与助力效率,减轻外骨骼整体质量,提高了穿戴舒适性。国内外对柔性外骨骼的研究多采用多关节耦合助力,装置重量均在5kg以上,主要以平地行走为主,能够增加关节力矩15%左右。本文研究一款用于健康人体行走的柔性外骨骼,其集成性好,穿戴便捷,在上下楼和爬坡路段可以倍速提高人体踝关节和膝关节运动机能,未来适用于快递、搬运等从业人员使用。
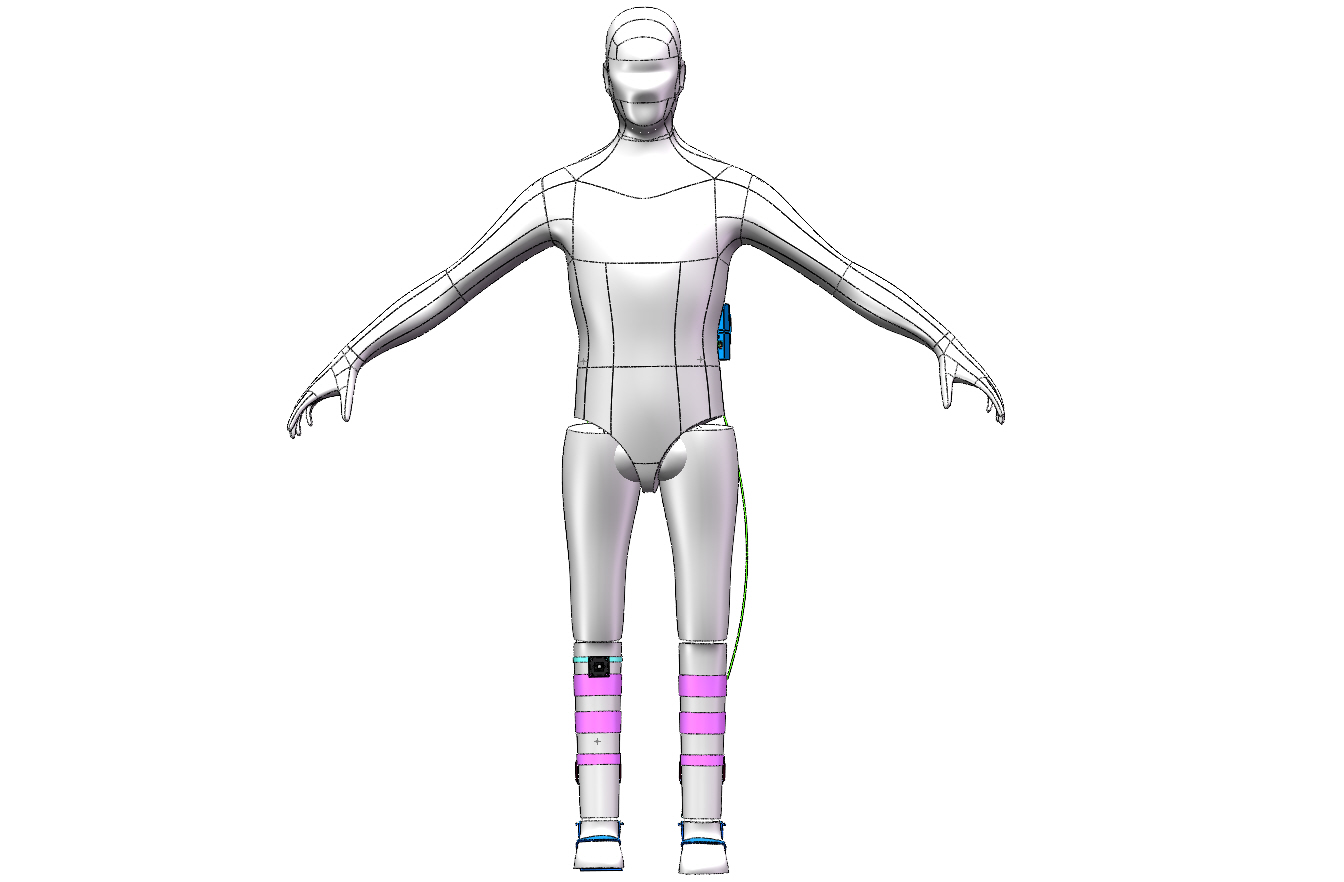
结构说明:本文设计的柔性外骨骼结构主要对下肢膝关节、踝关节进行助力,主要助力的运动方式为屈伸动作,助力方式是通过柔性绑带对关节支架进行拉力提升。本设计是柔性外骨骼,膝关节和踝关节之间采用柔性带连接其自由度与人体无需保持一致,为了保证下肢外骨骼与人体进行实时交互,设计了贴合人体背架装置和固定足套,通过肩带、鲍登线和卡扣连接。在小腿处设计柔性固定件,脚部后跟处设计刚性足套,两者用连接件串联。跟腱处设计拉力传感器,膝盖处安装识别系统,用于反馈上层控制器选择不同的行走模式。
功能与使用:外骨骼机器人旨在开发适合人体穿戴的智能装备,能快捷地为人体关节提供额外的能量补偿,以增强关节运动机能。下肢柔性外骨骼的设计需结合穿戴的便捷性,使用的稳定性,相应的快速性等特点。笔者根据健康状态下人体下肢的骨骼、肌肉结构设计一款适用于复杂环境的可快速穿戴的柔性外骨骼,将外骨骼集成于鞋上,其主要助力点为踝关节,大大提高了穿戴效率。柔性外骨骼设计完成后,对外骨骼进行仿真分析,验证设计满足力学要求。