
大赛作品详情
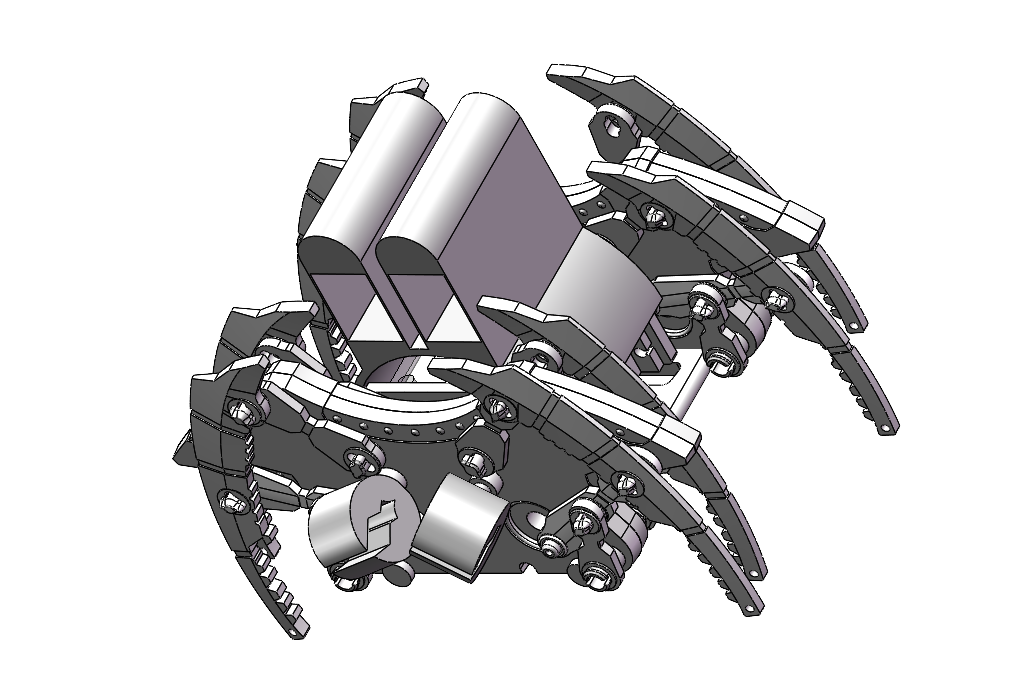
作品名称:机械蟹
学校名称:湖南城市学院
参赛队伍:机械蟹
参赛学生:周梓晗 刘扬 杨亚菲
指导老师:袁越阳


