
大赛作品详情
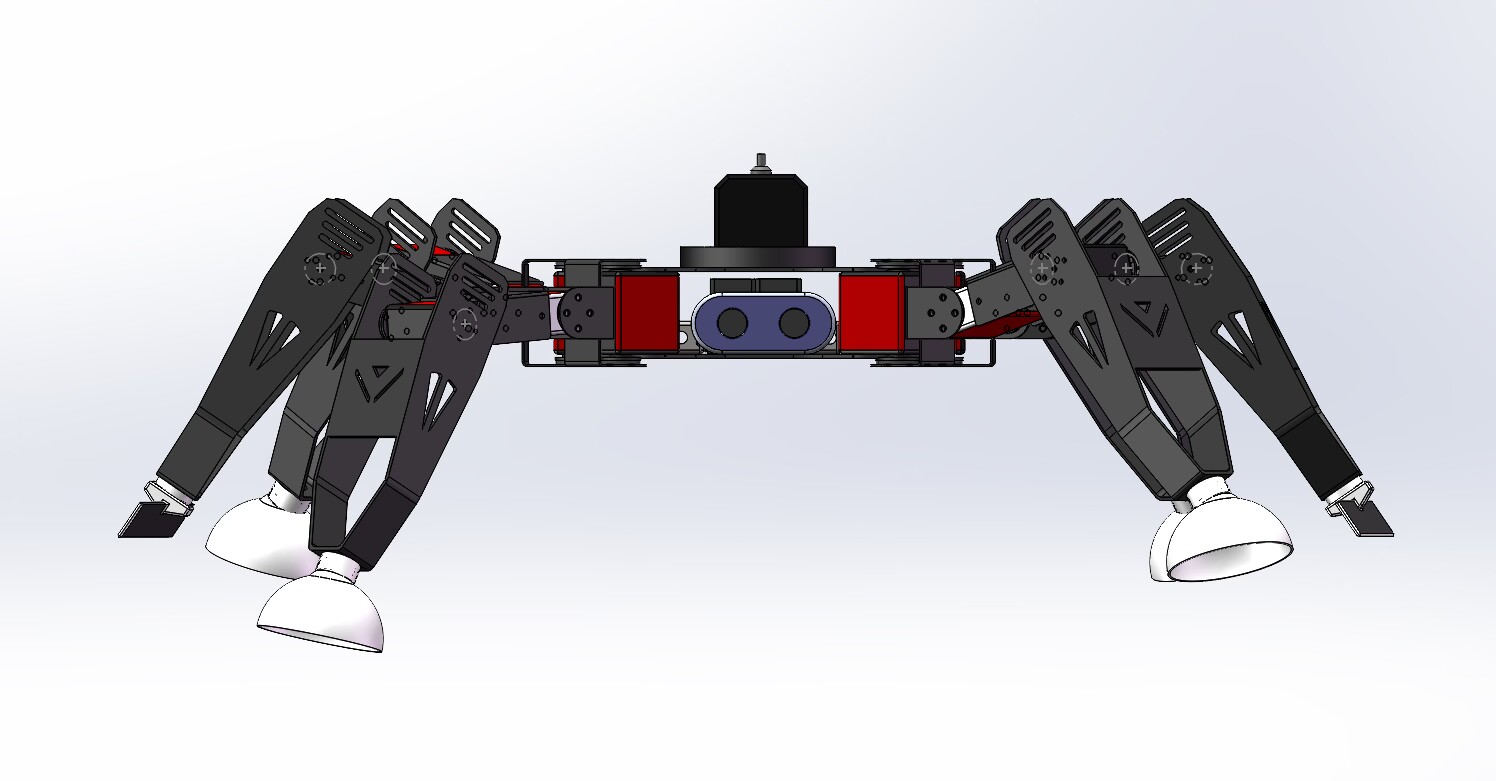
作品名称:基于仿生特性开发的玻璃幕墙清洁机器人
学校名称:湖南城市学院
参赛队伍:蜘蛛清洁队
参赛学生:胡申才 孟文博 武韫韬
指导老师:李航洋



