开拓者实训台
一、研究现状
近几年来,随着自动化工业的不断发展,机械手也将随之壮大起来.在未来几年里它的发展趋势如下:
1.工业机械手性能不断提高,并体现在高速度、高精度、高可靠性、便于操作和维修。
2.机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造机械手整机。在国外已有模块化装配机械手产品问市。
3.工业机械手控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化。器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。
4.传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机械手还应用了视觉、力觉等传感器,而遥控机械手则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制;多传感器融合配置技术在产品化系统中已有成熟应用。
6.当代遥控机械手系统的发展特点不是追求全自治系统,而是致力于操作者与机械手的人机交互控制,即遥控加局部自主系统构成完整的监控遥控操作系统,使智能机械手走出实验室进入实用化阶段,产生生产价值。
国内前景:
那么中国作为制造业大国,要实现制造业自动化必然缺不了机械手的应用,机械手市场前景实为广阔,为工业的制造生产带来变化的不仅仅是机械手使用的现代化生产技术,而且随之而来的现代化管理模式也会大大改变企业的生机和活力和市场竞争力。机械手的应用对于企业调整产业结构,转型升级,是一个十分良好的契机。
二、创意描述
现代化工业的突飞猛进,作为先进机器人的技术,更是受到各大企业的青睐,机器人不仅可以解决用工荒,替代人工,还可以降低生产成本。由技术更新而随之而来的现代化管理模式也会大大改变企业的生机和活力和市场竞争力。机械手的应用对于企业调整产业结构,转型升级,是一个十分良好的契机。
而中国作为一个制造业大国,机器人也是中国制造“2025”的重要组成部分,要实现国家制造业自动化必然缺不了机械手的应用,机械手市场前景十分广阔。
而该设备集 PLC 及机器人技术于一身,不仅满足了机器人及 PLC 的训练要求,还为机器人提供多个实例进行实训,此实训平台能有效解决培养机器人技术人才的问题,通过一台设备多种训练功能,模拟车间作业。达到实训的效果,具有针对性强、结构化等特点,是培养人才的最佳设备。
三、组成部分
开拓者实训台的总体是由机械手模块和周围模块组成,其中:
机械手模块由机械手控制柜、机械手机身、夹具、示教器等部分组成。
周边模块由机架、检测模块、自动分拣模块、码垛模块、视觉系统、控制盒、气源处理模块、控制面板及编程轨迹练习平台组成.
二、产品简介

开拓者实训台机械结构总成图
(一)自动分拣系统的结构和工作原理
结构:
自动分拣系统由三大部分组成:送料模块和输送带模块和支撑部分。
送料模块包括了推料气缸、井式送料装置,输送装置包括了输送带、直流电机。
工作原理:
推料气缸推动工件至输送带,输送带在直流电机的作用下运动,并将工件经输送带输送至装夹区,工件输送至装夹区(输送带尽头拦截位)并被红外线感应器感应到时,发出输送带停止信号和机械手装夹信号,输送带因输送带停止信号停止运动,机械手则因装夹信号移动至装夹区将工件装夹移动。 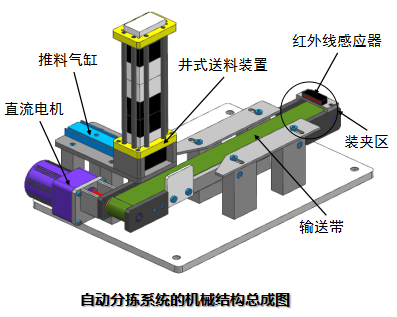
(二)自动分拣系统输送装置的驱动机构工作过程和结构
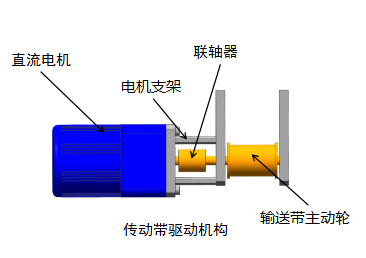
传动带驱动机构如图所示。采用的直流电机,用于拖动传送带从而输送物料。它主要由电机支架、电动机、联轴器等组成。
工作原理:
直流电机是传动机构的主要部分,其作用是电机主轴转动带动传送带运动从而输送物料,电机支架用于固定电动机,联轴器由于把电动机的轴和输送带主动轮的轴联接起来,从而组成一个传动机构。
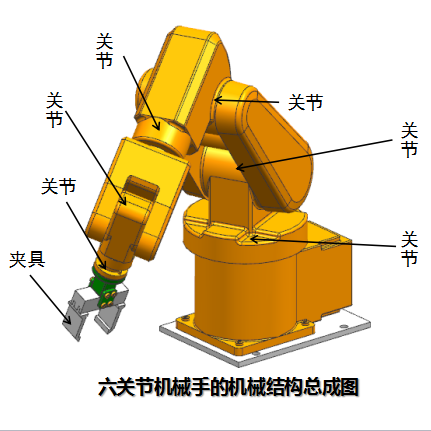
(三)机械手系统的工作过程和结构
机械手系统是多功能机器人实训操作台的一个不可缺少的重要组成部分,机械手系统由机械手控制柜、机械手机身、夹具、示教器等部分组成。通过示教器和PLC编程定位,然后完成抓取和放下工件的功能。
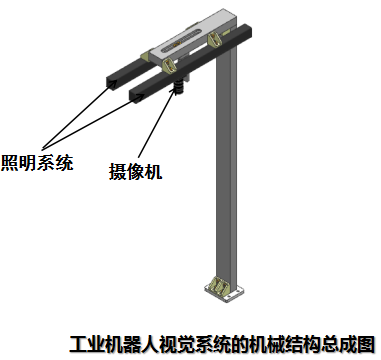
(四)视觉系统的结构和工作原理
工作原理:
视觉系统就是利用机器代替人眼来作各种测量和判断。摄像机探测到物体已经接近视野中心时向图像采集部分发送信号。图像采集部分按照事先设定的程序,分别向摄像机和照明系统发出信号。灯光的开启时间应该与摄像机的曝光时间同步。摄像机曝光后,正式开始一帧图像的扫描和输出。图像采集部分接收模拟视频信号并将其数字化,并对数字化图像进行处理、分析、识别,获得测量结果。通过处理结果控制流水线的动作、进行定位、纠正运动的误差等。
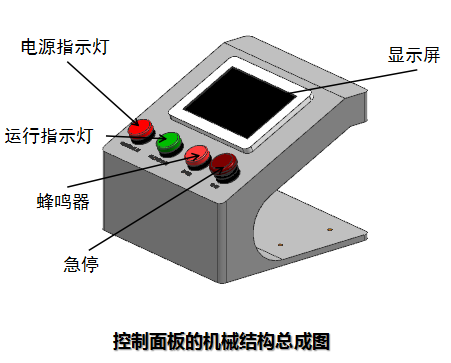
(五)控制面板的结构和工作原理
工作原理:
在开拓者实训台的PLC控制盒中通过输出按键编码信号,以实现各个按键的功能,同时PLC控制盒输出相应指示灯的编码信号输入指示灯处理电路,从而实现按键指示灯的实时显示。同时PLC控制盒将程序编码输入显示屏处理电路将程序编码显示至显示屏。
(六)示教器的结构和工作原理
工作原理:
通过操作人员导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,机器人将精确地按示教动作,一步步完成全部操作。

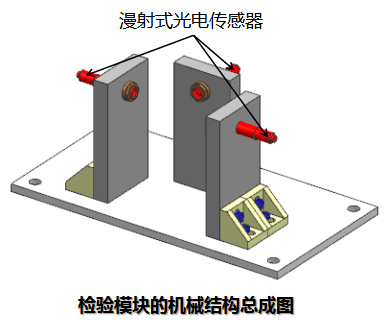
(七)检验模块的结构和工作原理
工作原理:
机械手将工件移动至检验模块,通过漫射式光电传感器检测工件特性,利用物体对近红外线光束的反射原理,由同步回路感应反射回来的光的强弱而检测物体的存在与否,光电传感器首先发出红外线光束到达或透过物体或镜面对红外线光束进行反射,光电传感器接收反射回来的光束,根据反射光束的强弱判断物体的存在、颜色、大小、形状等。
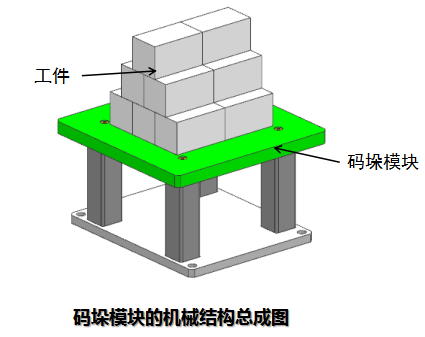
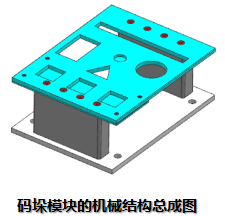
(八)码垛模块的结构和工作原理
机械手将工件移动码垛模块进行码垛。
 (九)编程轨迹练习平台的结构和工作原理通过给定特定的几何形状,用机械手沿几何形状进行运动编程。
(九)编程轨迹练习平台的结构和工作原理通过给定特定的几何形状,用机械手沿几何形状进行运动编程。
五、性能特点
1、结构化的设计,多模块化,易于维修。
2、一台设备可以实现多种训练功能,从而达到减少实训成本得目的。
3、突出高新技能及自动化特点,让学生身临其境,体验工厂氛围。
4、针对式训练特点,让学生可以发现不足,改进缺点,达到专业能力平衡发展。
通过多个模块结合或单一模块可实现的实训内容有:
1、机器人的认知入门及简单操作训练;
2、机器人码垛、搬运训练;
3、机器人轨迹训练;
4、机器人 TCP 训练;
5、机器人控制接线训练;
6、PLC 编程训练;
7、传感器的认知与了解训练;
8、传感器的应用训练;
9、气动元件的原理及应用训练。
六、注意事项
(1)机器人与设备的碰撞,机器人在运行过程中与设备的碰撞,如果机器人与设备运行不协调就会造成机械碰撞,容易造成机器损坏;
(2)示教器的损坏,示教器作为机器人的独立一部分,人员在操作时如果位置没有摆放好,容易造成示教器摔坏或破损;
(3)机器人对周围人员的人身安全的隐患,如果操作不当,容易对周围人造成人身的伤害,特别是头部等部位;
(4)机器人夹具的安全隐患,机器人夹具由金属、气动元件等组装而成,操作时千万不能把手等伸到夹具中去操作,这样会容易造成机械、气动元件在动作过程中造成伤害;
(5)操作过程中应防止在设备周围打闹等,防止碰撞设备造成人员人身安全;
(6)实训 TCP 时的安全隐患,由于 TCP 材料比较尖,实训时防止伤到自身或周围等人员;防止用手、眼睛等去触摸顶尖;
(7)设备的用电安全,设备上有高压电与低压电,防止设备元件上高压电与低压电搞错互换,接错线等引起的安全事故;
(8)防止触电安全;
(9)防止设备回潮或是不慎把水滴到设备上而引起的短路,若有此类事情,应使设备干燥后再启动;
七、创意描述
现代化工业的突飞猛进,作为先进机器人的技术,更是受到各大企业的青睐,机器人不仅可以解决用工荒,替代人工,还可以降低生产成本。由技术更新而随之而来的现代化管理模式也会大大改变企业的生机和活力和市场竞争力。机械手的应用对于企业调整产业结构,转型升级,是一个十分良好的契机。
而中国作为一个制造业大国,机器人也是中国制造“2025”的重要组成部分,要实现国家制造业自动化必然缺不了机械手的应用,机械手市场前景十分广阔。
而该设备集 PLC 及机器人技术于一身,不仅满足了机器人及 PLC 的训练要求,还为机器人提供多个实例进行实训,此实训平台能有效解决培养机器人技术人才的问题,通过一台设备多种训练功能,模拟车间作业。达到实训的效果,具有针对性强、结构化等特点,是培养人才的最佳设备。













