
大赛作品详情
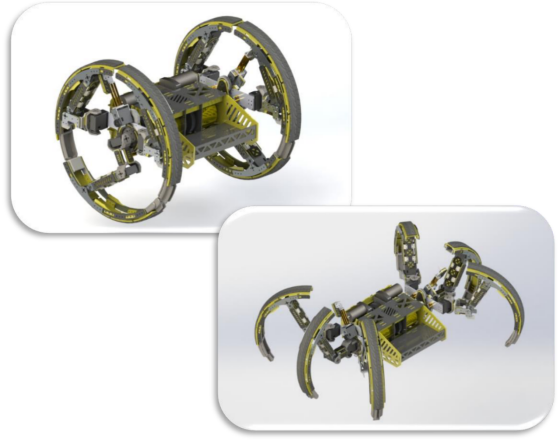
作品名称:千机——双模态可变形机器人
学校名称:哈尔滨工业大学
参赛队伍:千机
参赛学生:张永龙 武志鹏


