
大赛作品详情
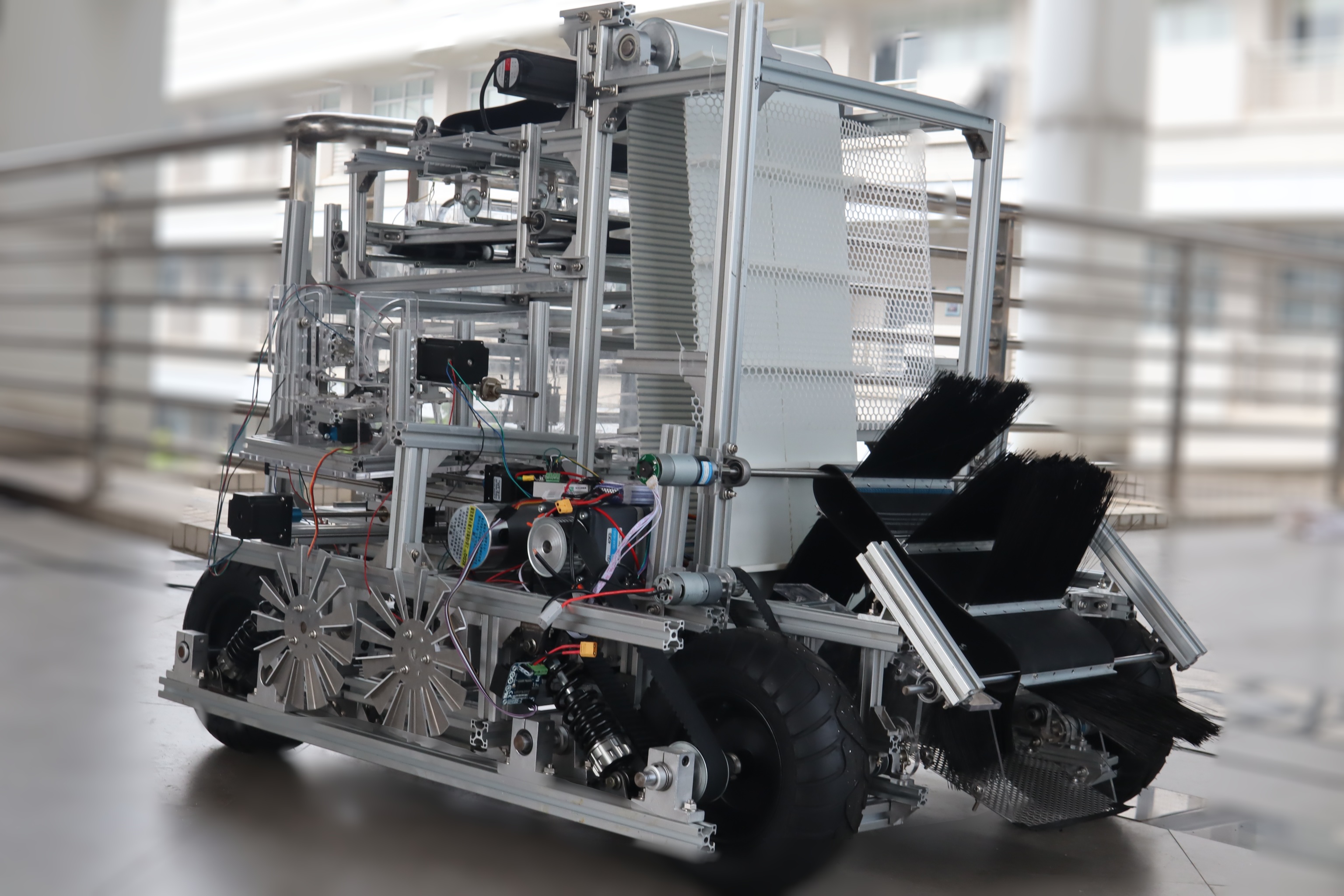
作品名称:沙滩清扫机
学校名称:广州大学
参赛队伍:Beach Sweeper
参赛学生:辜志勇 曾智帆 冼嘉辉
指导老师:江帆 刘长红


