中国是14亿人口大国,同时也是农业大国,粮食历来都是国家长久治安百姓幸福生活的保证。 如今,随着我国经济的发展,以及人口的持续增长,我国对于粮食的需求量也随着上涨。经济发展进入新常态,农业发展面临农产品价格"天花板"封顶、生产成本"地板"抬升、资源环境"硬约束"加剧等新挑战,迫切需要加快转变农业发展方式。如今,实现农业生产的自动化便显得尤为重要。为了应对农业发展问题,解决粮食“够不够”、“好不好”、“强不强”的问题充分贯彻落实党的三农政策,实现从传统农业向现代农业转变。我组的番茄喷药采摘一体机,用机械代替人力畜力提高生产效率,以提高劳动生产率,资源产出率和商品率为途径,保障农产品供给,形成多元化的产业形态和多功能的产业体系。在番茄的生产环节可极大程度上减少了其施药、采摘环节上的人工成本,另一方面同时也促进了其种植、采摘、施肥、喷药等环节的发展。对于番茄生长周期以及生长时期的植株高度的变化时出现的病虫害问题、成熟后期不同植株的果实生成高度问题,本作品采取了施药机械臂,采摘机械臂两种执行系统,充分针对其上文提出的问题;同时,本作品具有智能化、自动化等特点,代替了传统的人工施药,从而避免了药物残留对于作业人员的伤害。综上,本作品满足番茄等茄科茄属植物的各种需求,实现了番茄的种植、施肥、采摘、检测病虫害实现喷药的一体化过程。该设备主要有车载体、传动控制装置、采摘机械臂装置、检测虫病害装置、施药机械臂装置等五种装置组成,各装置系统相辅相成。采摘机械臂装置的工作原理:由车载主体到达相应位置,根据红外线检测系统获取番茄果实的具体坐标,由采摘机械臂活动至指定位置,再由机械臂装置上的机械手装置精确采摘收割番茄,之后由机械臂将番茄转移至收获篮中从而实现番茄的采摘过程。
检测喷药过程的工作原理,当车体上的红外线检测器检测到番茄植株受到病虫害的现象时,检测器的PLC装置就会给小型水泵上的PLC装置发送一定的信号,使其水泵工作,并使施药机械臂装置调整至最佳角度与位置,后将水箱中的提前准备好的药物喷洒出去,以此实现检测喷药的过程。
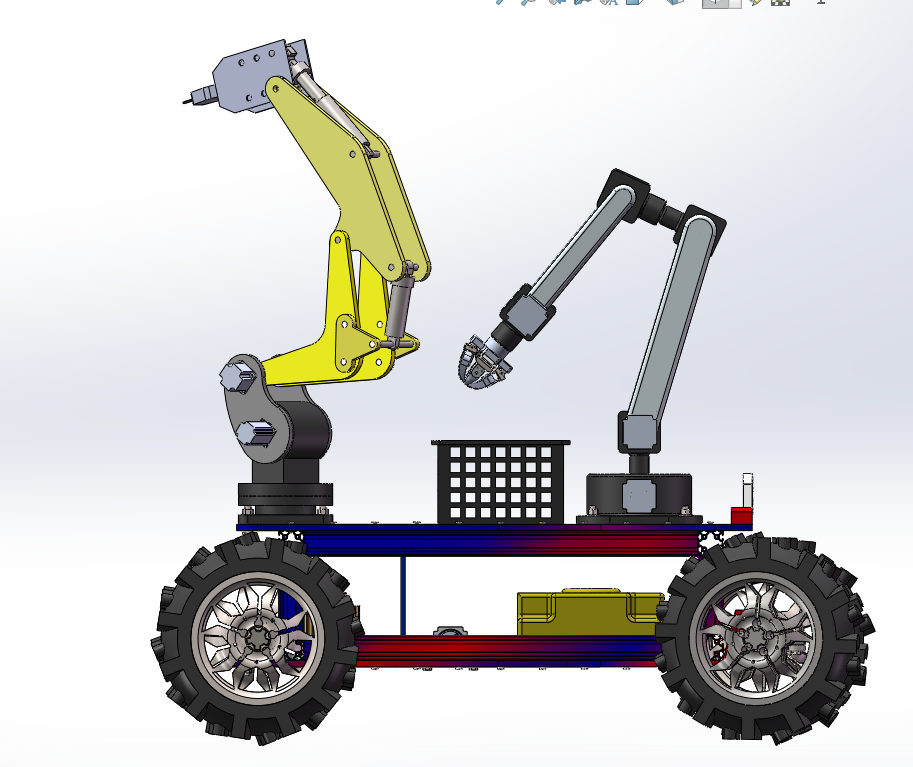
创新点:集体车架为镂空设计,使其本作品的本身质量较轻,生产成本较低;同时,机械臂的构造方便装置的收纳,使其交通运输极为便捷,更便于收纳。
行驶道路上所存在阻碍其正常工作的障碍物时,检测系统将会自动进行扫描,将获取的信息通过PLC装置与BuildingAutomationSystem系统反映到其车体的方向控制系统,从而实现车辆的转向,使其完美的避免车体的碰撞。
创新点:通过检测系统的扫描,可以获取不同植株的果实生成的具体空间位置,利用PLS控制检测系统对施药机械臂系统或采摘机械臂系统进行分控调节,使其机械臂对其指令锁定的目标完成预定命令。
喷药系统装有小型流量控制器RAPIFLOW FCW Series,控制施药时的具体用药量,减少施药时的药品用量,与人工工作相比,可减少施药环节对环境的破坏。