1开发背景
我国工业机器人研究开发工作从20世纪70年代至今,我国焊接技术逐渐成为制造业和工程建设中不可缺少的重要工艺与技术支撑。经过十几年的持续努力,在国家的组织和支持下,我国焊接机器人的研究在基础技术、控制技术、关键元器件等方面取得了重大进展,并已进入使用化阶段,形成了点焊、弧焊机器人系列产品,能够实现小批量生产。为加快推动我国制造业加快迈向全球价值链中高端,国家在工业机器人领域及焊接设备领域出台了一系列政策——《中华人民共和国国民经济和社会发展第十四个五年规划和2035年远景目标纲要》指出我国在工业机器人及焊接设备行业要深入实施智能和绿色制造工程,发展服务型制造新模式,推动制造业高端化智能化绿色化,推动机器人等产业创新发展。近年来我国为顺应微电子技术的发展,采取了pc机与焊接机器人的结合运用,从而解决了专用控制器计算等焊接机器人加工方面的负担重,实时性差的问题,具有良好的开放性,安全性。而近年来在机器人研究也以焊接智能化为核心来进行,以机器人为核心的自动化生产线具有广阔的市场发展前景和强劲生命力。
2多轴伺服机器人一体化焊接站的结构、系统设计说明
2.1整体结构设计
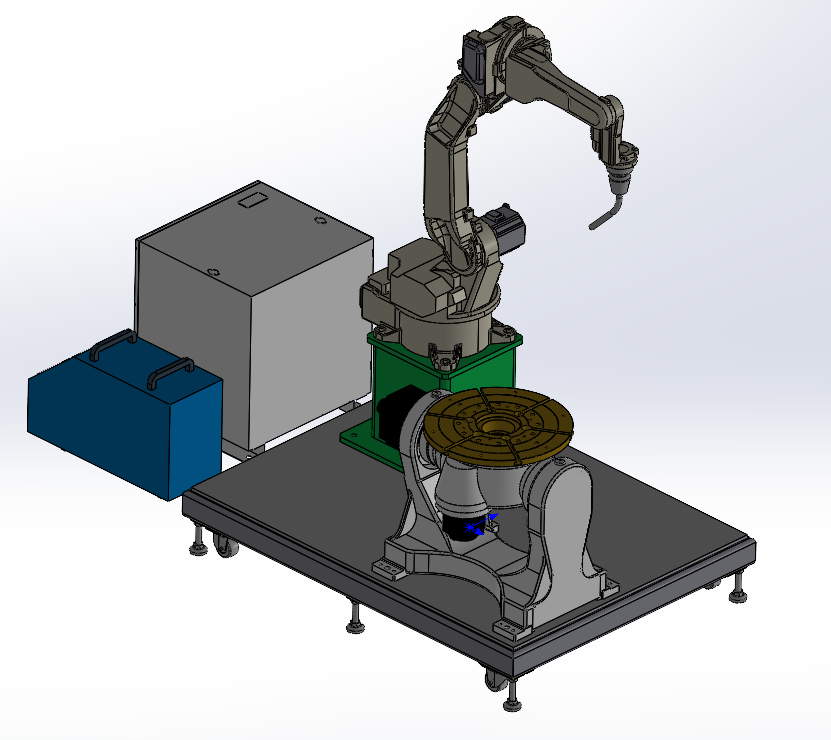
装置结构包括焊接加工平台、焊接机器臂、pc终端控制器等主要结构组成一体化焊接站。国内焊接行业中,为较好地控制焊接质量,提高生产效率,普遍使用两轴变位机作为焊接工件的夹持工作台,但是,国内此类产品质量参差不齐,国外质量较好的产品价格普遍较高。
故在同类产品中,本项目方案可实现焊接工位变换的变位,提供一种焊接机器人工作台翻转角度的调节装置,该调节装置不仅结构简单、操作容易和生产成本低,而且可对焊接机器人工作台翻转角度和翻转位置进行高精度调节控制,以保证焊接机器人的焊接角度的精确性,从而提高焊接机器人在工作台上焊接操作的质量和精度,以及提高焊接生产效率,可以高精度的变位转换位置。
2.2主要结构特征
(1)焊接加工平台有多轴进行控制,其内设置多个连接轴进行多方位的转换和控制,设置连接轴与圆形凹盘配合,两侧固定端与圆形凹盘采取双向的连接轴配合,底部采取一个扭转式连接轴进行连接,圆形凹盘底部设一齿轮调节进行旋转啮合控制。
在焊接平台底部与机器运输台连接,底部设有导轨——二维位置调节结构,可以在运输台上快速调整到加工位置,电动机给运输台提供所需的能源作为动力,使运输平台可以运动传输工件成型品。
(2)焊接机器臂采取六轴自由度调位机械臂,可以有效的控制机械臂对于加工位置的定位和确定,机器臂采取六个连接轴连接组成,可以使机器臂具有较强的灵活性和精确性,在多个连接轴的地方采取花键、平键等进行键连接,使机器臂可以进行调节、拆卸,快速的更换零件,在加强机器臂稳定性的同时,增加了机器臂的灵活性和可拆卸性。在焊接部位可采取激光加工、电焊、电弧焊。机器臂的控制方面,采用集成了PC技术、图像技术、逻辑控制技术的VME运动控制器,性能可靠稳定,高速高精度。
(3)pc终端控制器,控制系统包括PLC,PLC分别与伺服驱动器、交流电焊机控制箱、人机交互界面、控制按钮连接,伺服驱动器与伺服电动机连接,终端控制器采取DMC630M 三轴运动控制器,基于高性能DSP为控制核心、FPGA协处理,插补算法、脉冲信号产生及加减速控制、I/O信号的检测处理,均由硬件和固件实现,确保了运动控制高速、高精度及系统稳定。
2 具体实施方式及过程
焊机加工平台:
利用气动马达作为动力机构输出动力,主动摩擦轮传动为一级减速,同时从动摩擦轮作离合作用。当工作台翻转到预设角度时,推动部件的动作气缸推动从动摩擦轮滑环使得从动摩擦轮与主动摩擦轮分离,切断动力;同时,从动摩擦轮在压紧弹簧的弹性元件复位反弹和动作气缸驱动力作用下压紧制动盘,与制动盘接合,迅速将从动摩擦轮制动,蜗杆锁死,实现准确角度停止翻转。当翻转工作台需要反转复位时,控制机构控制气动马达反转,推动部件的动作气缸推动从动摩擦轮滑环使得从动摩擦轮与制动盘分离,从动摩擦轮同时与主动摩擦轮接合,动力接通,实现翻转工作台需要反转复位。对于焊接平台的控制采取基于高性能DSP为控制核心、FPGA协处理,插补算法、脉冲信号产生及加减速控制,均由硬件和固件实现,确保了运动控制高速、高精度及系统稳定。
焊机机器臂:
六自由度机器臂采取六关节串联结构,各个关节以“电机+减速器”为传动,在小臂处留有安装摄像头等外部设备的接口,方便用户进行人机交互反馈。机器臂的控制方面,采用集成了PC技术、图像技术、逻辑控制技术的VME运动控制器,性能可靠稳定,高速高精度。机器臂的输入传感器固定在夹持器上,夹持器可绕第一方向转动地固定连接有第一连接件,第一连接件可绕第二方向转动地固定连接有第二连接件,以此类推。第一方向与第二方向之间的夹角在0度与180度内,第二方向与第三方向之间的夹角同理,便于实时将目标物锁定在镜头中央附近,便于跟踪识别目标物,简化了操作过程,降低了操作难度。
3项目创新点与特色
项目创新特色概述:
(1)调节装置成本低廉,维护简单,操作容易,而且具有一定的运动精度。
(2)以交替切换的方式实现带动焊接机器工作台翻转或停止时的传动
(3)实时检测焊接机器人工作台翻转角度的检测机构
(4)较高的负载、更快的轴动作速度、大的许用扭矩和转动惯量使机器人应用广泛