
大赛作品详情
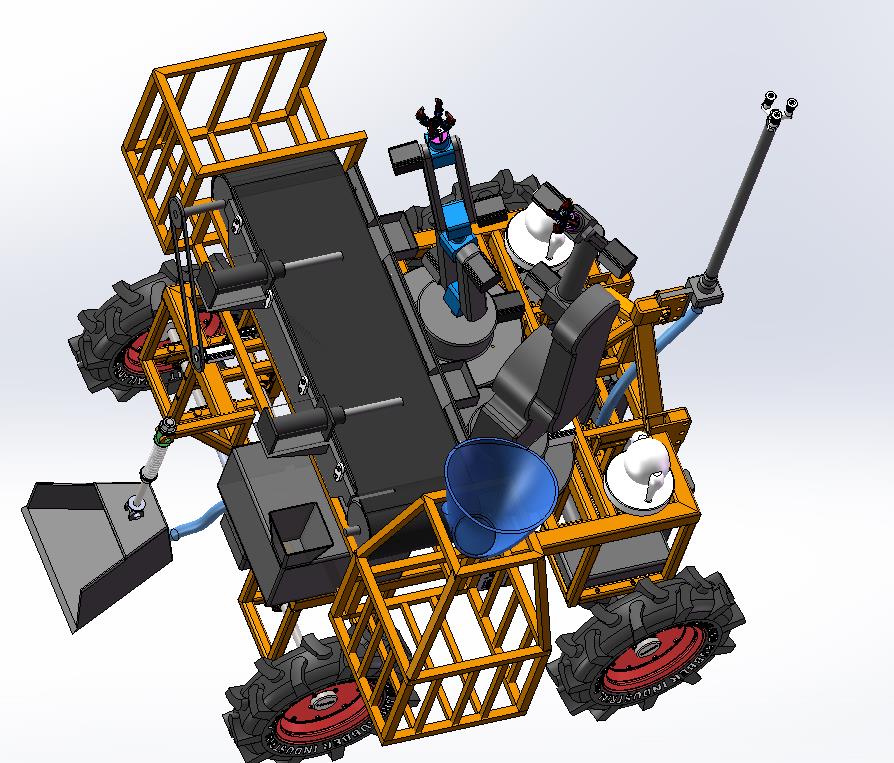
作品名称:基于Efficient Agriculture猕猴桃采摘、套种等多功能一体机设备
学校名称:烟台科技学院
参赛队伍:众创家
参赛学生:岳庆 刘翔宇 孙闻
指导老师:宋丽 李超


