
大赛作品详情
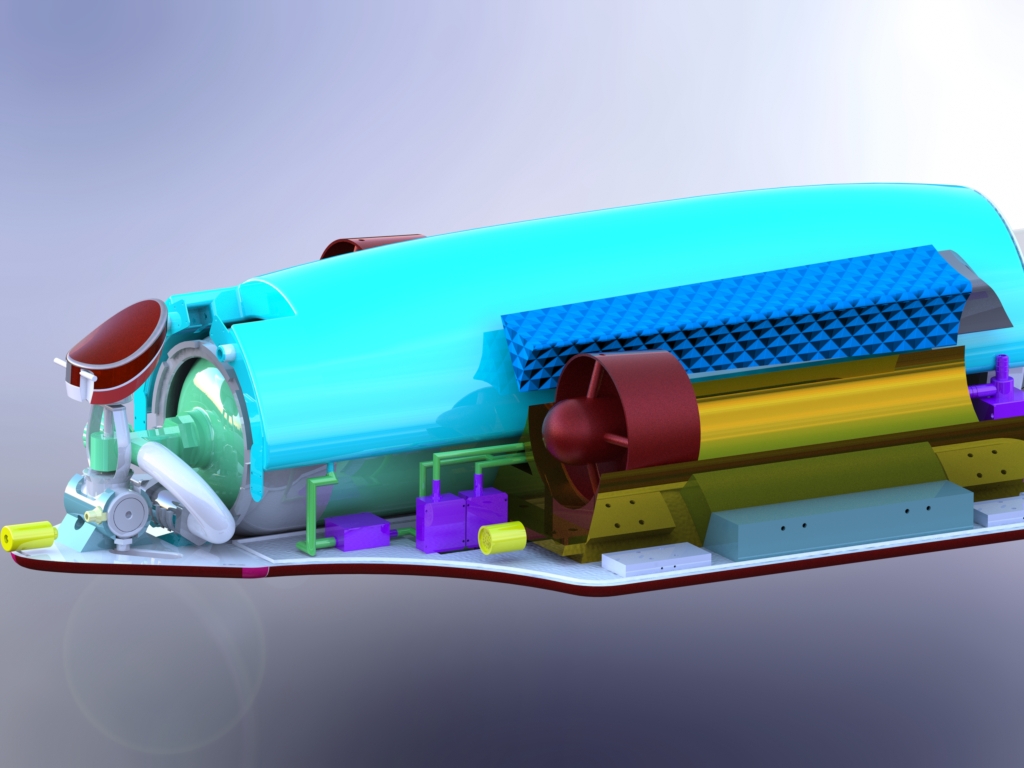
作品名称:一体化可穿戴式仿生潜水推进器
学校名称:盐城工学院服装
参赛队伍:秃头小宝队
参赛学生:姚如玮 王硕 张劲翼
指导老师:安晶 洪捐


