
大赛作品详情
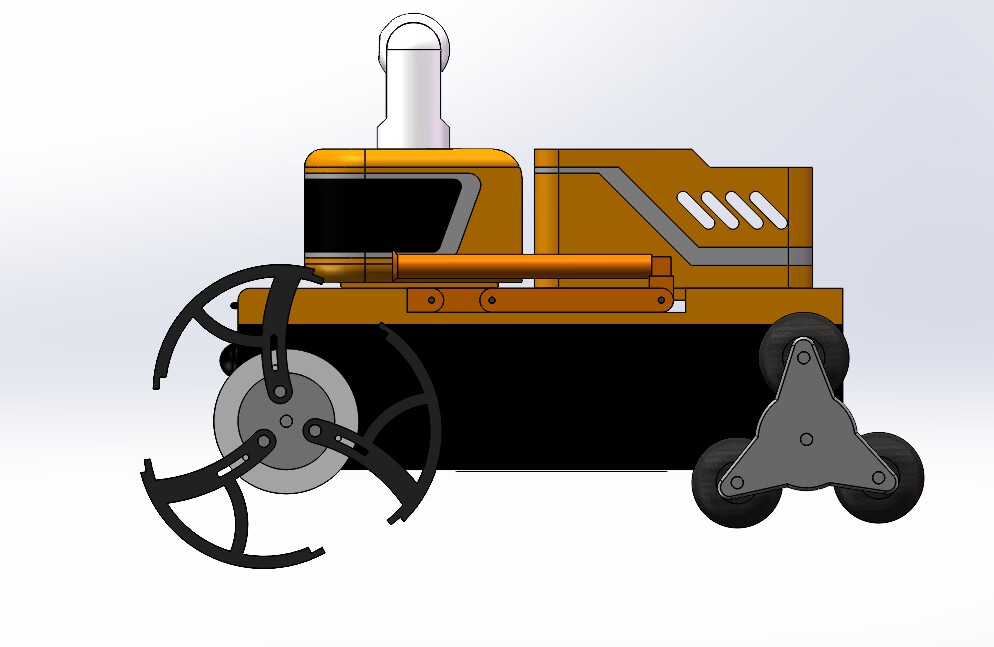
作品名称:楼梯攀爬机器人控制设计
学校名称:青岛黄海学院
参赛队伍:繁星队
参赛学生:王珍萃 刘京润 牛孜儒
指导老师:宋慧


