
大赛作品详情
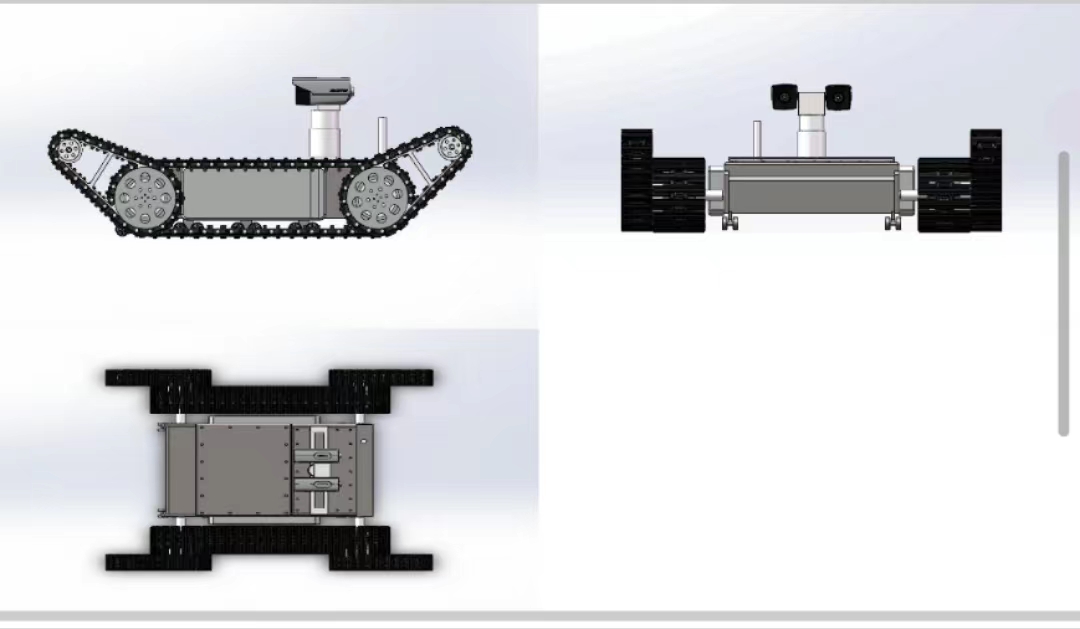
作品名称:四支臂履带式巡检机器人
学校名称:青岛黄海学院
参赛队伍:大吉大利
参赛学生:盛佳慧 牟三康 郝玉秀
指导老师:王晓静


