
大赛作品详情
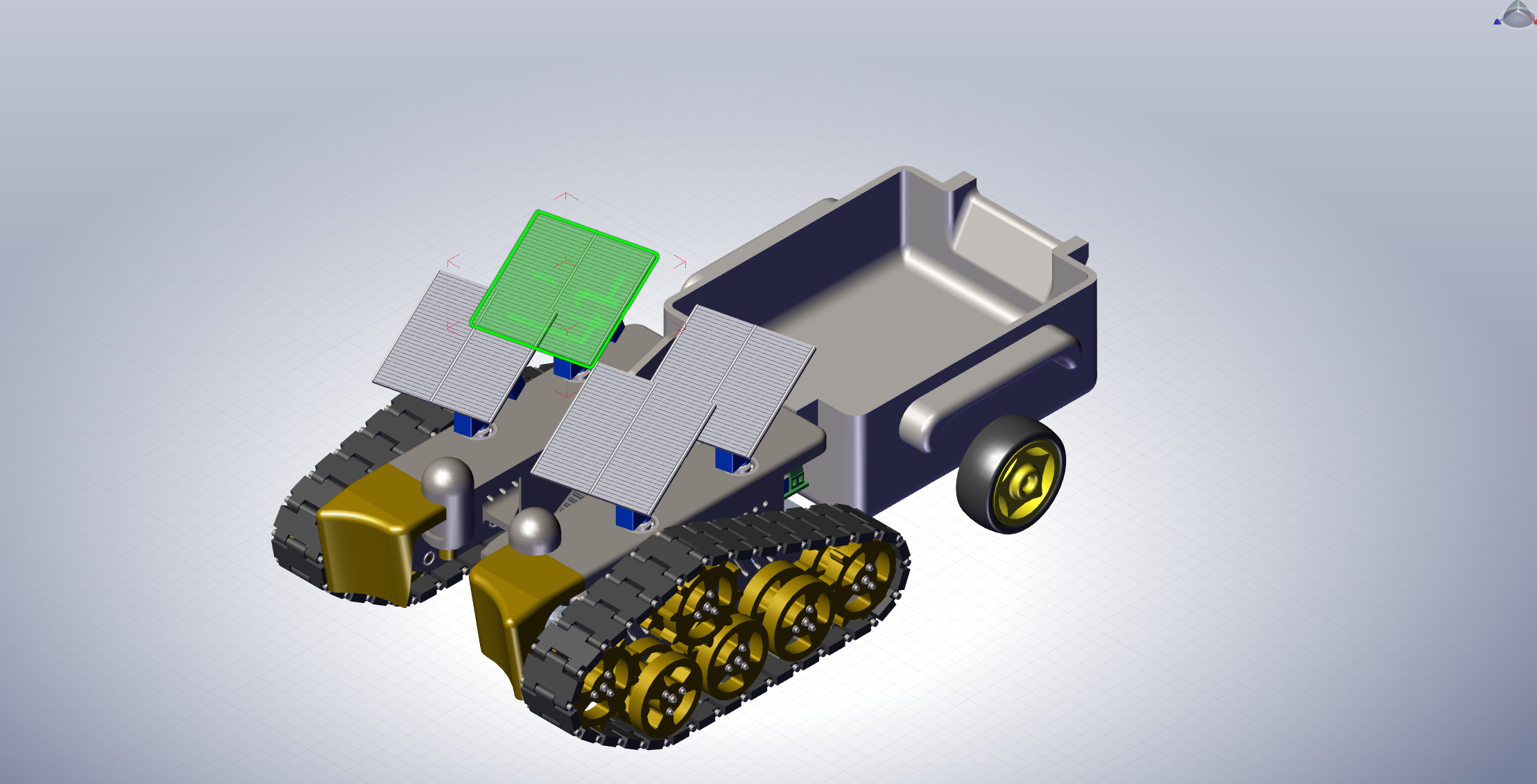
作品名称:清理草坪小车
学校名称:青岛黄海学院
参赛队伍:胜赢
参赛学生:李一帆 李圳 朴奥洋
指导老师:周新院


