
大赛作品详情
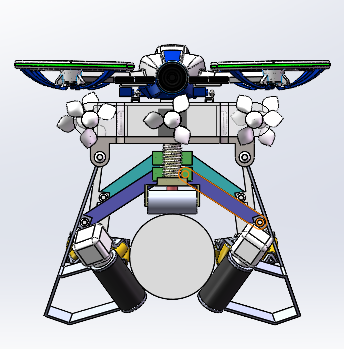
作品名称:爬管机器人
学校名称:青岛黄海学院
参赛队伍:机器人智能装备工作室一队
参赛学生:王方淼 巩忠领 李忠澳
指导老师:赵鑫鑫


