
大赛作品详情
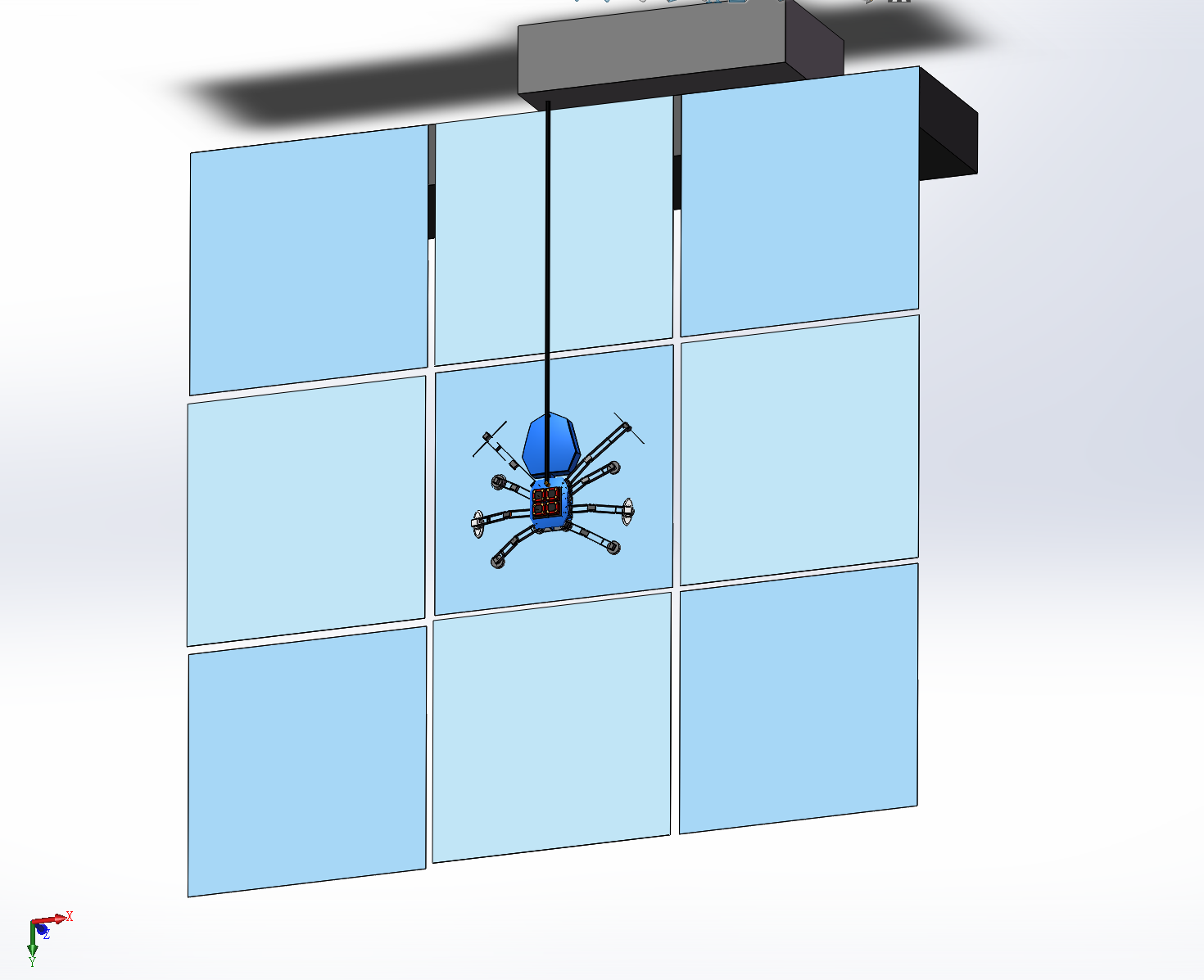
作品名称:仿生高空清洁机器人
学校名称:湖南城市学院
参赛队伍:仿生高空清洁机器人
参赛学生:孟文博 姜一鸣 余德良
指导老师:李航洋


