
大赛作品详情
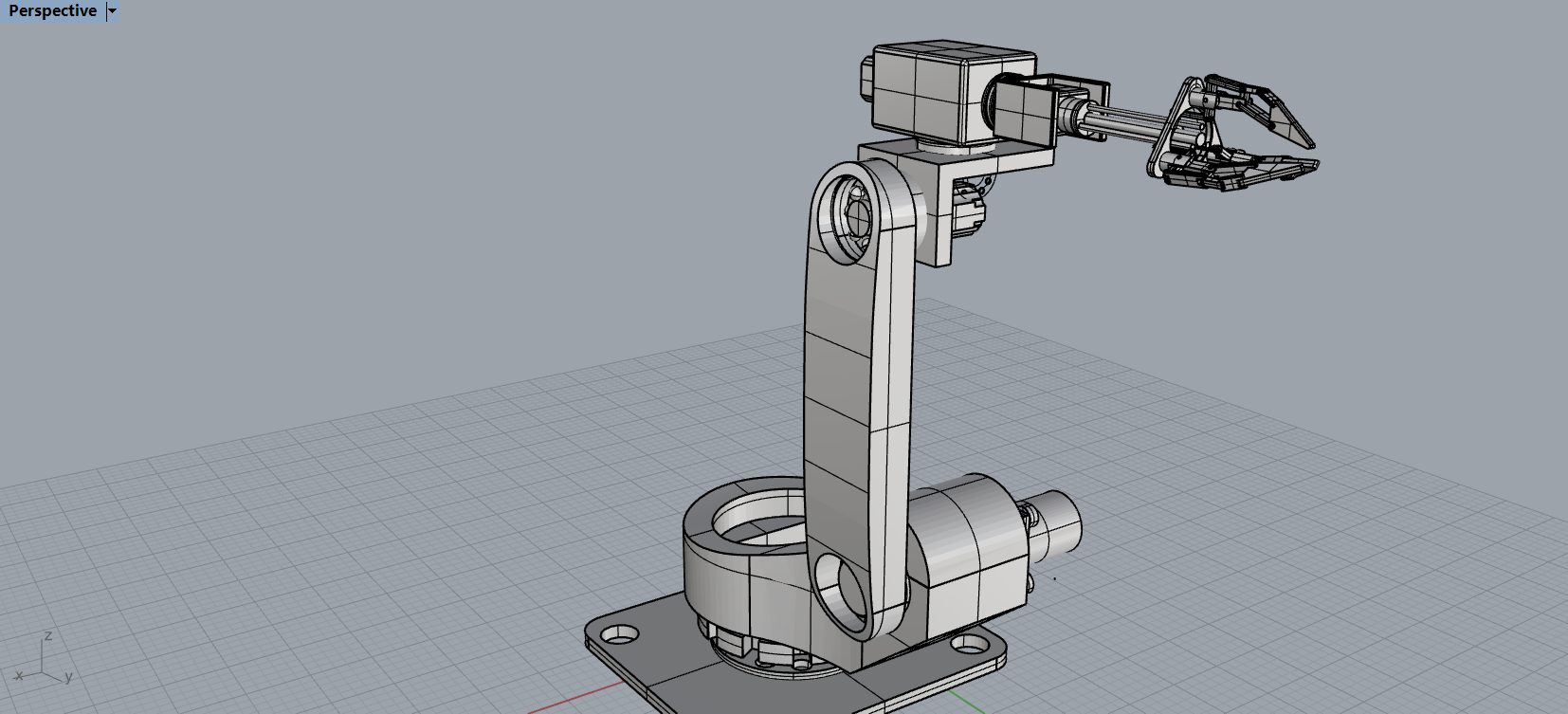
作品名称:新型夹持机构工业机器人
学校名称:保定理工学院
参赛队伍:打豆豆
参赛学生:李梦浩 高英杰
指导老师:王胜曼 牛博英


