
大赛作品详情
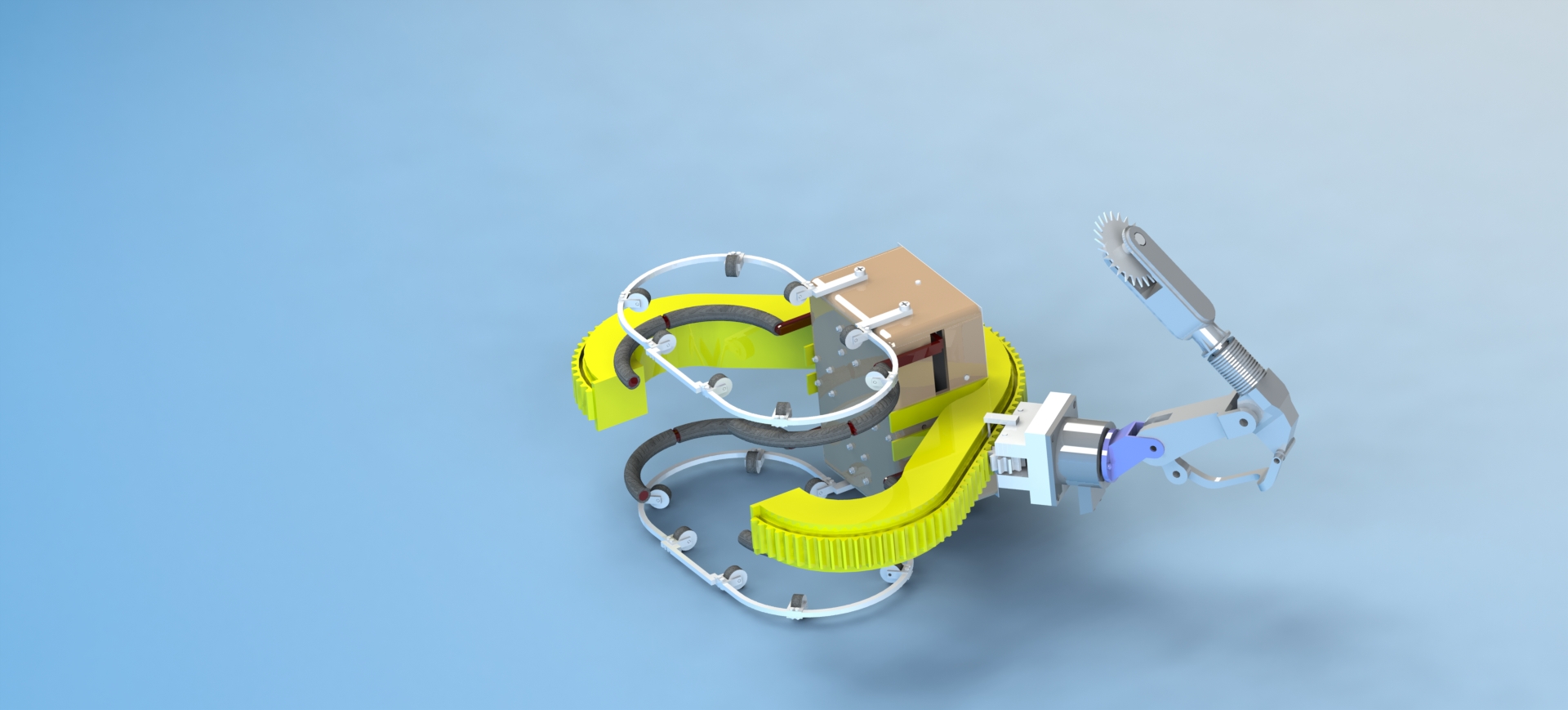
作品名称:椰子自动采摘关键技术研究及其装备开发
学校名称:浙江海洋大学
参赛队伍:海阔天空队
参赛学生:邓江盛 谢飞 王佳胜
指导老师:袁跃峰 张文英


