
大赛作品详情
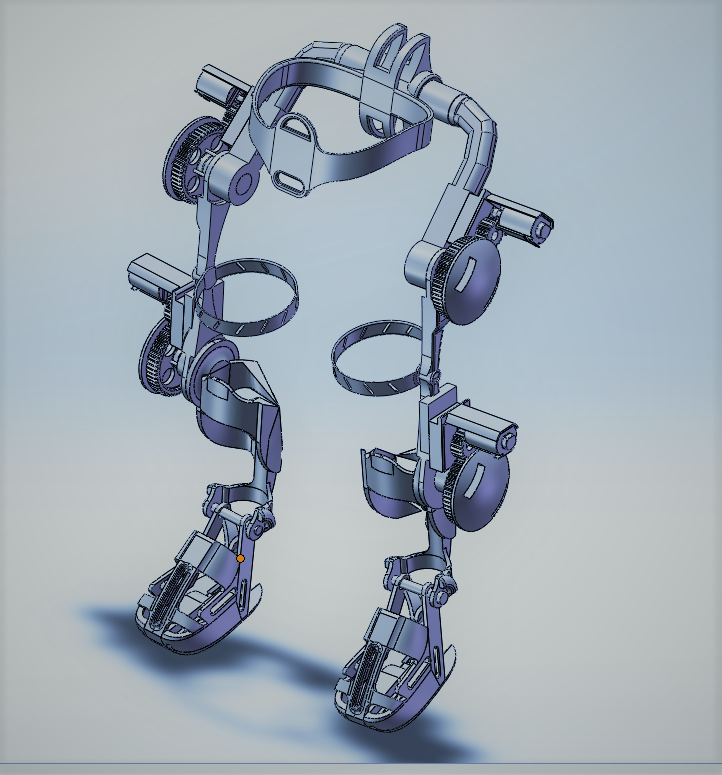
作品名称:下肢外骨骼助力器
学校名称:武汉城市学院
参赛队伍:欧克机械
参赛学生:曹润锋 朱泓齐 蔡昌雄
指导老师:杨维 徐江陵


