
大赛作品详情
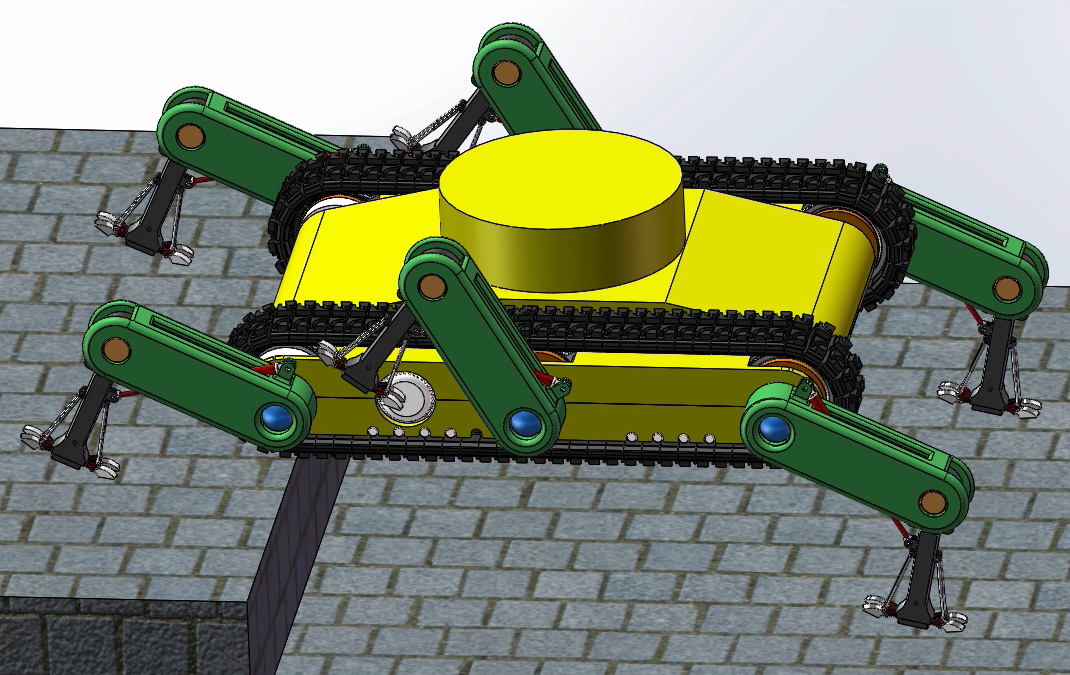
作品名称:一种可适应多地形的六足机器人
学校名称:三明学院
参赛队伍:冲上云端
参赛学生:刘金磊 林彬炜
指导老师:夏尔冬 王春荣


