
大赛作品详情
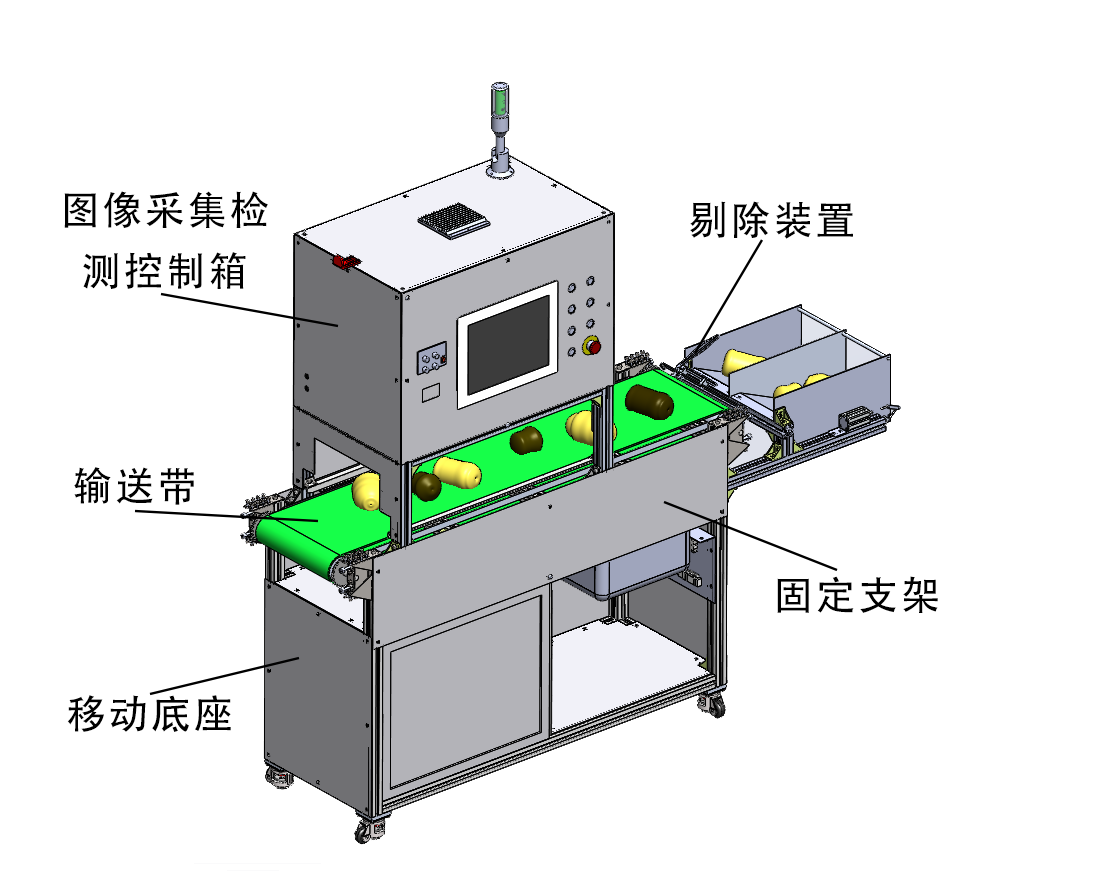
作品名称:基于机器视觉的马铃薯智能除杂装置
学校名称:山东理工大学
参赛队伍:103west
参赛学生:李晏兴 崔丽霞 孙卫孝
指导老师:杨振宇 王相友


