
大赛作品详情
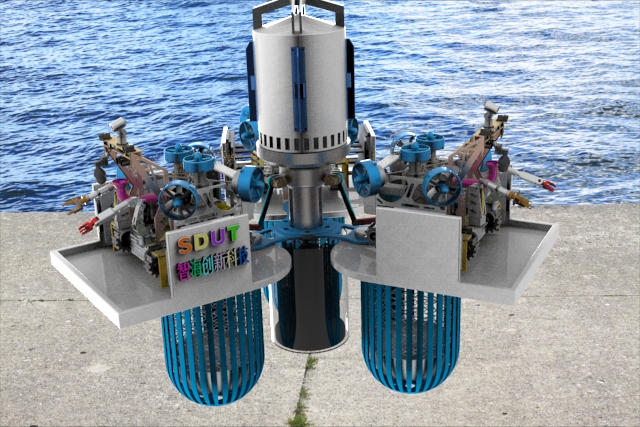
作品名称:多组机器人协同捕捞海参系统
学校名称:山东理工大学
参赛队伍:智海创新科技团队
参赛学生:翟长攀 程文青 李伟龙
指导老师:马立修 李昌朕


