
大赛作品详情
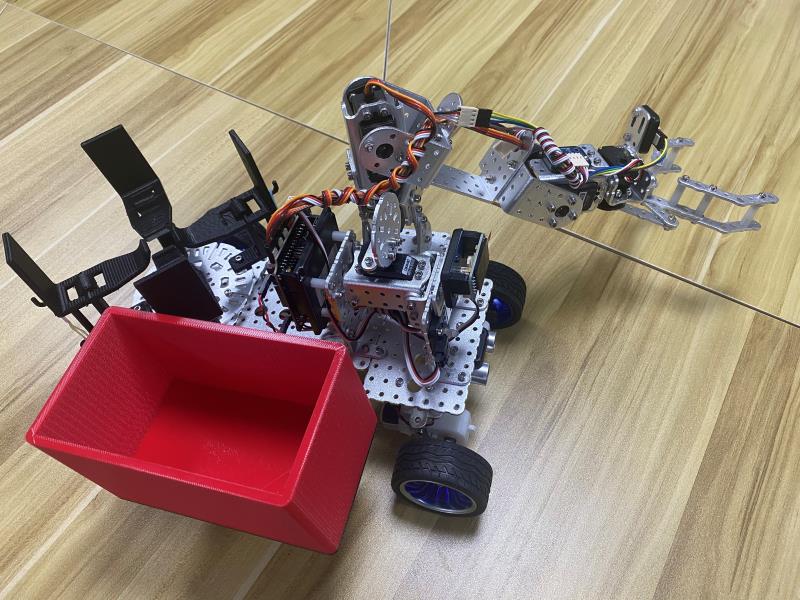
作品名称:“小馨”家庭型服务机器人
学校名称:浙江同济科技职业学院
参赛队伍:梦想起航
参赛学生:蒋应杭 董金燕 姚思诚
指导老师:刘娟 徐跃增


