
大赛作品详情
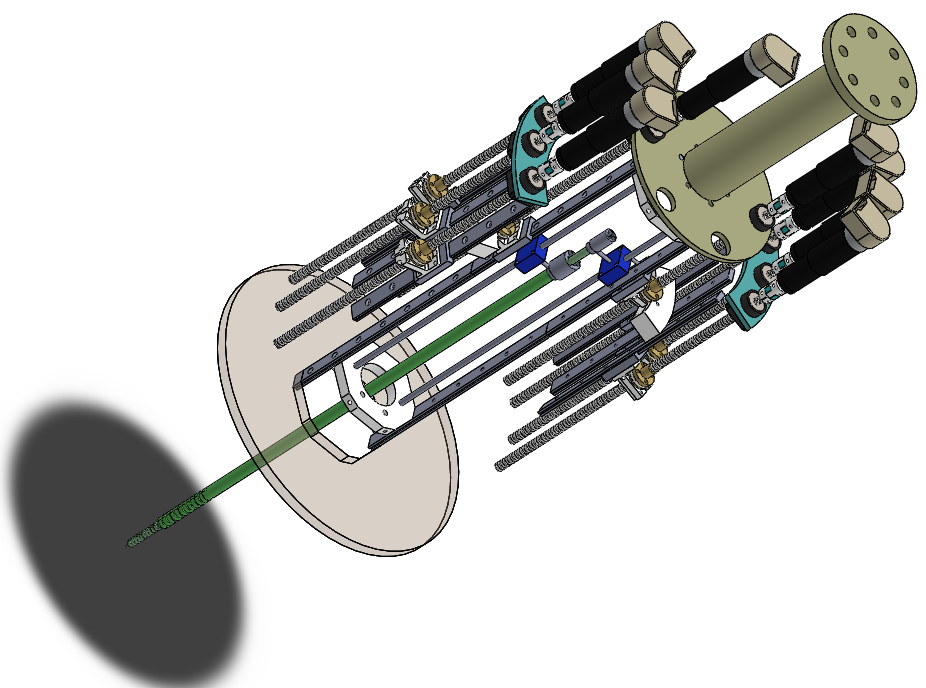
作品名称:绳驱咽拭子机器人
学校名称:山东理工大学
参赛队伍:医工机器人团队
参赛学生:贾利慧 王伟霖 叶会友
指导老师:牟宗高 宋汝君


