
大赛作品详情
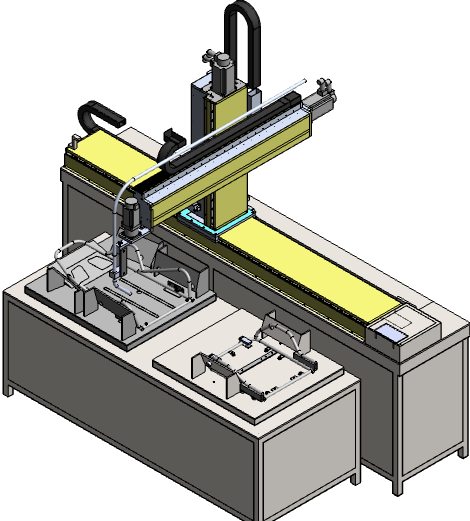
作品名称:四轴直线焊接机械手的设计
学校名称:钟山职业技术学院
参赛队伍:智能者
参赛学生:王海波 朱权勇
指导老师:徐留明 熊小娟


