
大赛作品详情
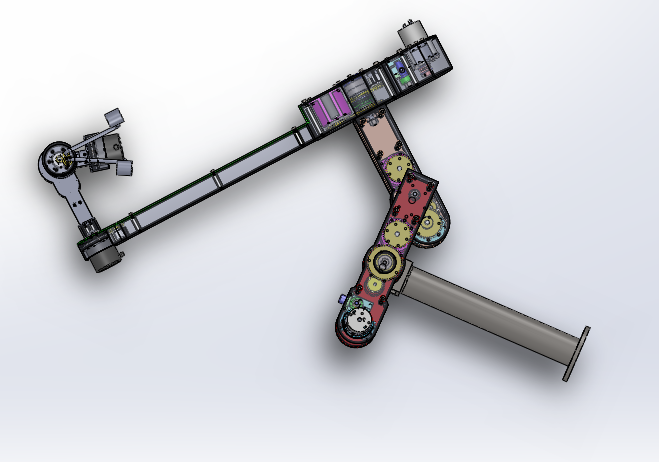
作品名称:力反馈主操作手
学校名称:天津理工大学中环信息学院
参赛队伍:齐心合“力”
参赛学生:尹明梁 贺欣瑞 陈文涛
指导老师:吕宁 张静


