一、产品简介
1.开发背景
当代高校食堂回收餐具区排队现象严重,由于就餐时间集中,就餐人数较多,造成食堂内比较拥挤,工作人员收盘时间紧张,工作量大,学生需要长时间的排队送餐具,会浪费广大学生时间,严重影响大学生的就餐体验,影响校容校貌,由于工作时间集中,广大收餐人员更是苦不堪言,所以处理高校食堂收餐区拥挤现象尤为重要。
2.设计方案
由于机械臂在各行各业中得到了愈来愈广泛的应用,机械臂控制的多样化、 复杂化的需要也随之日趋增多。作为当今科技领域研究的一个热点,提高机械臂 的控制精度、稳定性、操作灵活性对于提高其应用水平有着十分重要的意义。
经过仔细的分析和研究之后,我选择的是STM32VET6单片机进行控制,运动的控制选用舵机进行控制。数据采集采用超声波传感器实现。 通过机械臂将碗盘夹起,转过一定的角度之后,将厨余垃圾倾倒到提前设计好的桶里面,然后再转过一定的角度将碗盘放入指定的收盘盒当中,从而实现收 取碗盘全过程智能自动化。首先根据机械臂系统的控制要求,整体上设计出单 CPU 的系统控制方案,即 通过控制主控制器输出的 PWM 波的占空比实现对舵机转动的控制,进而实现各个 关节的位置控制。在硬件方面,主要论述了如何以 STM32VET6、舵机为主要器件, 通过搭建硬件平台和设计软件控制程序构建关节运动控制系统。然后按照结构化 设计的思想,依次对以上各部分的原理和设计方法进行了分析和探讨。在软件设计方面,按照模块化的设计思想将控制程序分为初始化模块和运行模块,并分别对各个模块的程序进行设计。
3.功能
通过STM32VET6单片机来实现智能收盘机 器人的功能。当单片机上电,按下启动按钮后,显示屏以及驱动芯片按钮会开始工作。显示屏模块显示智能收盘机器人几个字,下方通过文字和箭头的方式提示 同学们要把餐具放在指定的 A 区域,驱动模块将开始驱动舵机实现机械手臂的收 盘,倾倒,摆放,一站式服务,从而实现收盘全过程智能化。
4.使用说明
启动按钮按下之后,机械臂将按开始初始化显示屏亮旋 转到 A 位置机械爪夹取旋转到 B 位置机械臂成 90 倾倒旋转到最后到位置C 机械爪松爪的全过程。显示屏模块会显示智能收盘机器人几个字,下方 提示同学们要把餐具放在指定的 A 区域,以及通过箭头指向位置 A 所在的方向, 来保证同学们能够将餐盘放对位置,从而智能收盘机器人的平稳运行。
二、产品说明
经过仔细的分析和研究之后,选择STM32VET6单片机进行控制,运动的控制选用舵机进行控制。在单片机最小系统的基础上扩展按键接口和舵机接口,构成机械臂控制系统,最终用于餐厅当中收盘以及厨余垃圾的倾倒,实现收盘智能化,工作当中无需收盘工作人员亲自动手,从而减轻工作人员工作强度,提高工作效率。
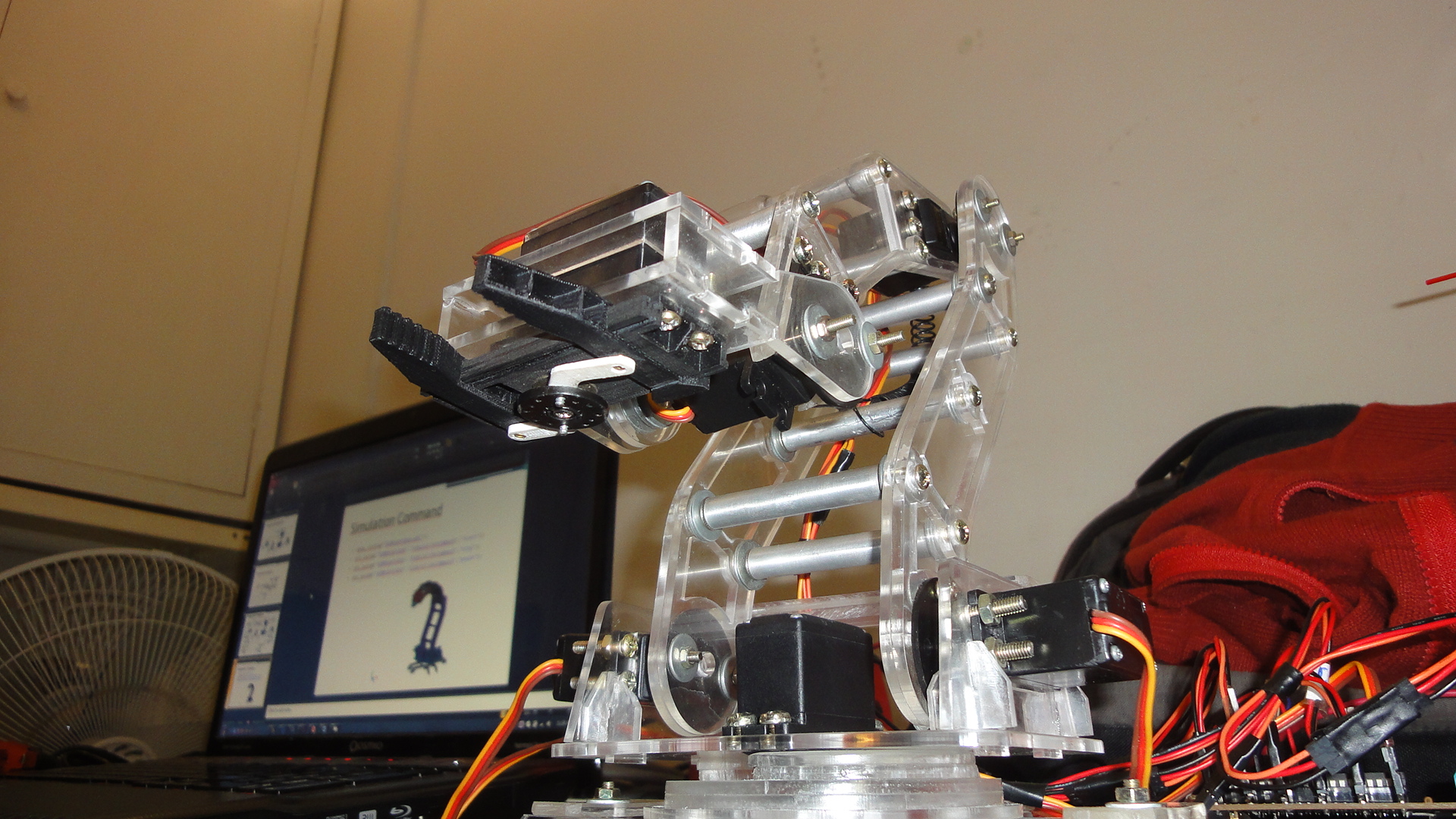
主要工作原理为通过舵机来控制机械臂各个关节的转动,机械爪旁边的舵机负责机械爪的开闭角,来实现对碗盘的抓取,下方的舵机控制机械臂底盘部分的旋转,从而与机械爪配合实现对厨余垃圾的倾倒。
首先通过机械臂将碗盘夹起,转过一定的角度之后,将厨余垃圾倾倒到提前设计好的桶里面,然后再转过一定的角度将碗盘放入指定的收盘盒当中,从而实现收取碗盘全过程智能自动化。
硬件方面。采用餐盘与机械爪之间的配合,实现运行过程平稳牢固。控制柜的设计能够有效的保护单片机,增强本产品的可靠性。显示屏的设计能够告诉同学们这个智能收盘机器人是做什么的以及一些注意事项。桌子和下方垃圾桶的配合可以实现收盘,倾倒,摆放一站式服务,垃圾桶设计为灵活可移动式,可以进行快速更换,提高本产品的运行效率。
软件方面,应用C语言编程,通过STM32VET6单片机来实现智能收盘机器人的功能。当单片机上电,按下启动按钮后,显示屏以及驱动芯片按钮会开始工作。显示屏模块显示智能收盘机器人几个字,下方通过文字和箭头的方式提示同学们要把餐具放在指定的区域,驱动模块将开始驱动舵机实现机械手臂的收盘,倾倒,摆放,一站式服务,从而实现收盘全过程智能化。
根据机械臂系统的控制要求,整体上设计出单CPU的系统控制方案,即通过控制主控制器输出的PWM波的占空比实现对舵机转动的控制,进而实现各个关节的位置控制。在硬件方面,以STM32VET6、舵机为主要器件,通过搭建硬件平台和设计软件控制程序构建关节运动控制系统,按照结构化设计的思想对以上各部分的原理和设计方法进行了分析和探讨。在软件设计方面,按照模块化的设计思想将控制程序分为初始化模块和运行模块,并分别对各个模块的程序进行设计。
Solid Works软件制作的机械臂三维平面图,原因是Solid Works能够提供不同的设计方案、减少设计过程中的错误以及提高产品质量。Solid Works 不仅提供如此强大的功能,而且对每个工程师和设计者来说,操作简单方便、易学易用。
机械爪方面本次设计主要考虑到以下五点内容:
1. 应具有足够的握力即夹紧力,在确定手指的握力时,除考虑工件重量外,还应考虑在传送或操作过程中产生的惯性力和振动,以保证碗盘不致产生松动或脱落。
2.机械爪间应有一定的开闭角,两个爪张开与闭合的两个极限位置所夹的角度称为爪的开闭角,爪的开闭角保证工件能顺利进入或脱开。若夹持不同的工件,应按最大宽度的工件考虑。
3.应保证工件的准确定位:为使机械爪和被夹持工件保持准确的相对位置,必须根据被抓取碗盘的形状,选择相应的爪张开的大小。
4.应具有足够的强度和刚度:爪除受到被夹持工件的反作用力外,还受到机械手在运动过程中所产生的惯性力和振动的影响,要求具有足够的强度和刚度以防止折断或弯曲变形,但应尽量使结构简单紧凑,自重轻。
5.应考虑被抓取对象的要求:应根据抓取碗盘的形状、抓取部位和抓取数量的不同,来设计和确定机械抓的形状。
作为机械臂的一个重要组成部分,手臂不仅起到支撑被抓物体、手爪和其他关节的作用,而且还可以驱动手爪抓取物体,并根据事先预定的位直将碗盘运
到指定地点并进行倾倒。机械臂的结构形式必须基于其运动形式、动作自由度、抓取质量、受力情况和其他的固素来确定,整个系统的总质量比较大,受力也比较复杂,其运动部件的质量直接影响到机械臂的刚度和强度。所以,进行手臂的设计至关重要,机械臂设计方面主要考虑到以下两个方面:
1.为了避免机械臂在运动过程中发生较大的形变,要合理选择机械爪的截面形状。
2.偏重力矩要小。要尽可能减小机械臂运动部分的质量。
该设计根据机械臂的功能及搬运工作的任务的特点以及类型,为了使其在一定程度上具有操作的灵活性和运行性能的良好,经过多次的比较、讨论后,该设计选用多关节型的机械臂,它不仅具有动作的角度大的优点,还可以使机械臂在更大的空间内的运动。
三、产品特色
(1)控制方面采取了STM32单片机,STM32单片机程序都是模块化,接口简单,工作速度很快。故采用了STM32单片机,进一步确保了智能收盘机器人运行的稳定性。
(2)在工作上比人类工作效率高,能连续长时间工作,减少人工费的支出。
(3)体积小,搬运方便,相比与其他机器人来说,灵活性高,可以根据学生人数的来调整机器的数量,以达到资源的高效利用。
(4)采用传统PWM控制方式,相比于串行总线来说最大的特点就是廉价,从而降低了制造成本,其低成本的特点将为企业造就更大的商业价值。
(5)我们的用户广泛,既有各类学校食堂,又有企业员工食堂,当然每一个用餐的地方都是我们的市场。