
大赛作品详情
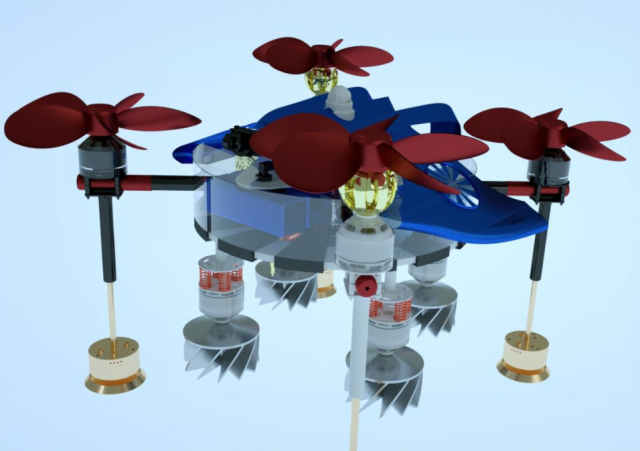
作品名称:基于船底清理的多功能水下机器人
学校名称:青岛理工大学(临沂)
参赛队伍:智汇创客
参赛学生:聂晓滨 朱学政 闫丕通
指导老师:胡耀增 王进宁


