
大赛作品详情
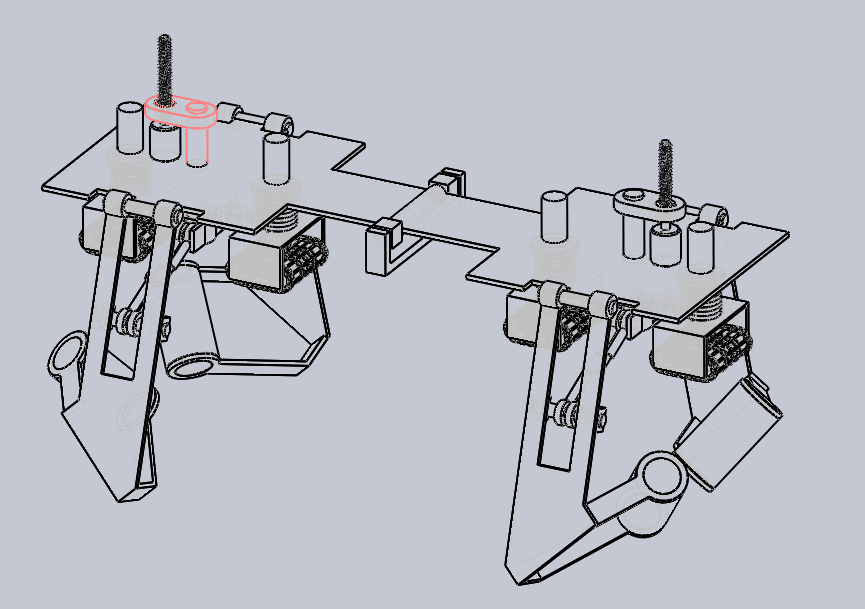
作品名称:多功能越障管外爬管机器人结构设计与研究
学校名称:青岛黄海学院
参赛队伍:全力以赴
参赛学生:李一凡 刘明华 王博龙
指导老师:郑义 曹传剑


