
大赛作品详情
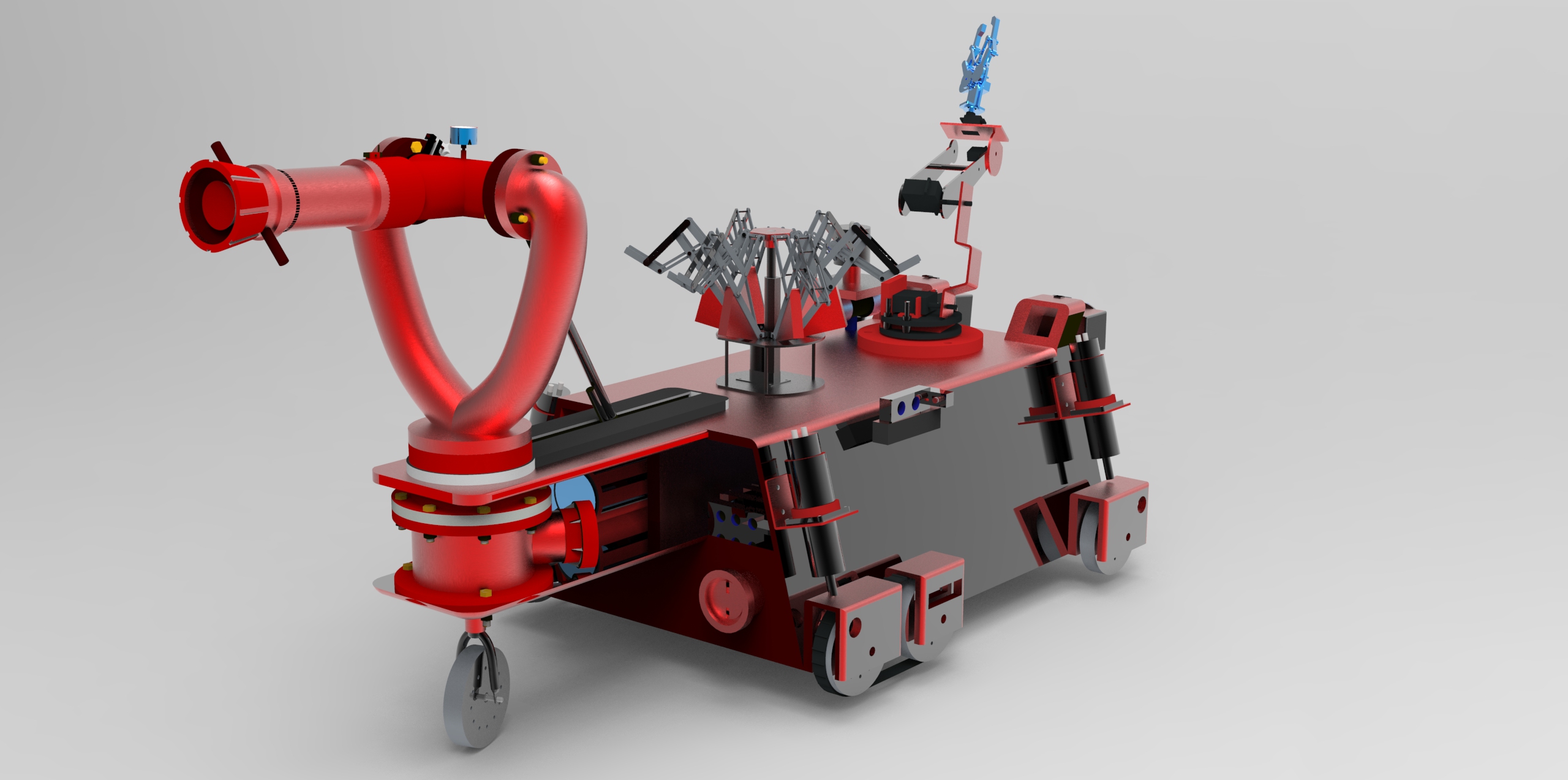
作品名称:消防搜救机器人
学校名称:武汉城市学院
参赛队伍:勇者先锋
参赛学生:王朝 王宁 吴峥
指导老师:杨维



