随着社会的发展,水果的大量生产提高了人民的生活质量,然而它的生产工作长期以来令人烦恼。在整个生产过程中,须经过采摘、包装等步骤,在目前国内的很多地区水果生产领域中,水果采摘、包装大多为人工操作,然而水果手工采摘包装将花费大量时间,生产率低,浪费劳动成本,一般工人易疲惫且误差多,因此水果采摘包装自动化生产成为社会的迫切需求,如何将多种水果(苹果、桃子、梨、柑子、桔子、荔枝、樱桃、葡萄等)分别进行系统的采摘、计数和包装成为一个核心问题。所以水果采收包装机将会成为国内农业市场的一个主流机器。
针对此类问题,本机械设计装置巧妙地整合了水果采摘、计数和包装的功能,研制了基于单片机的电气控制系统、设计新颖、结构简单、功能多样、价格低廉的水果采收包装机。该项目属于应用于现代化的创新性设计,大大地节省了人力物力的耗费,达到了水果的采摘和包装的最佳效果,对中小型农户具有广阔的应用前景。
本次机械设计作品为水果采收包装机,此设备主要通过更换不同摘果器完成对多种水果(苹果、桃子、梨、柑子、桔子、荔枝、樱桃等)的采摘、计数、包装功能,克服了一种机器只能采摘一种水果的局限性,实现了自动化操作,达到了提高工作效率、减轻劳动成本的目的。所以,此设备的设计可以广泛地应用于果园等农业生产中,大大缩短了劳动人员的工作时间。
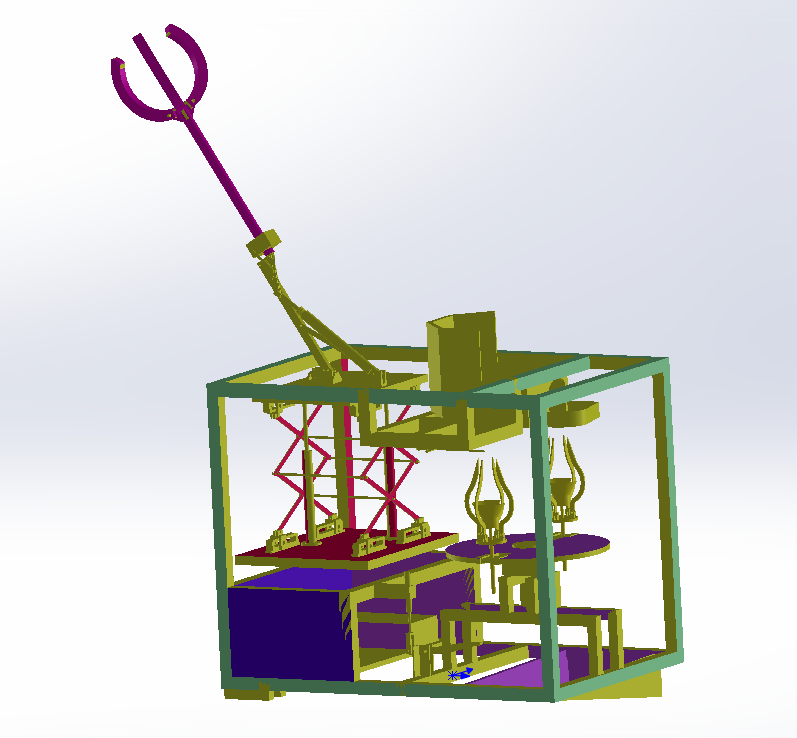
水果采摘装置由升降机构、微调机构和摘果机构三个子机构组成。升降机构作为一级升降,根据平行四边形在二维空间具有伸缩性的特点,通过气缸作为动力源与之结合组成升降机构。微调机构作为二级升降,通过电机带动丝杠运动实现升降微调补给。摘果机构下方与升降机构连接,该机构由二自由度的机械臂,摘果手指和剪刀组成,通过气缸作为动力源与之结合作为摘果机构。当水果在摘果手指中心附近时,摘果手指自动闭合,前端剪刀剪断水果把后机械臂前臂旋转135度到达水果存放装置后释放水果。
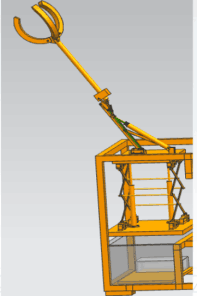
图1 水果采摘装置
水果抓取装置位于存放机构下方的转盘上,共有两个,是由气缸、爪、果托、连杆组成。抓取水果时,气缸推动果托带动连杆使爪张开,水果掉落在果托上后气缸收缩,并由转盘下方的旋转气缸带动转盘旋转180度到达套网机构下方。
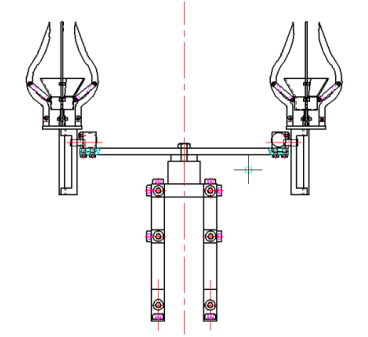
图2 水果抓取装置
水果存放输送装置位于整体框架上方。根据重力势能可以转化为动能和苹果、桃子、梨外形近似于圆形的特点,将收集装置做成有一定倾斜的方盒,内做成具有高低差的滑道,并在滑道的最低端开有直径为70mm的圆孔,在圆孔的外侧连接一个椭圆形辅助滑道,并在其上开有直径为70的圆孔,方便水果进入抓取机构。并通过光电门完成计数过程。
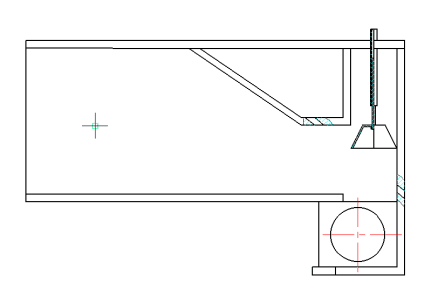
图3 水果存放装置
水果套网装置位于整体框架上方,由泡沫网盘、皮辊、电机、剪刀、气缸组成。套网时,电机带动皮辊旋转,从泡沫网盘中拉取泡沫网,达到设定长度后,气缸推动剪刀剪断泡沫网。
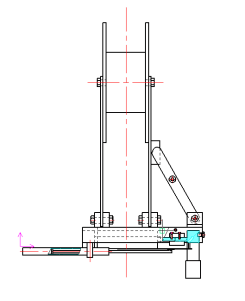
图4 水果套网装置
主要创新点
1.本结构在现有的采摘、包装技术基础上加以改进,实现了采摘、包装、计数、收集一体化;
2.通过机械臂、升降机构、微调机构之间精确配合,实现了一种装置对多种水果(苹果、桃子、梨、柑子、桔子、荔枝、樱桃、葡萄等)的采摘和包装;
3.在送网装置中皮辊上加入毛刺,使得泡沫网更容易张开;
4.采用机械机构、气动元件、附加简单的电路控制、制造成本低廉;
5.采用先进的智能控制系统,实现了多种类、多角度、多高度采摘、快速包装,工作效率高、实用性强。