一、作品的目的、意义
1. 创意背景:
随着城市现代化发展,特别是高层建筑的兴起,以玻璃壁而为代表的壁面结构逐渐演绎成华丽的“城市外衣”,如图1.1,图1.2所示。与此同时,也衍生出繁重的壁面清洗任务。当前,许多国家已对建筑壁面的清洗要求做出了明确规定,但一些越来越奇特的建筑结构设计也使清洗的难度和成本成倍增加。

图1.1 大型建筑玻璃幕墙 
图1.2 商品房玻璃结构
据统计,全国有95%城市高楼玻璃外壁采用的是人工清洗完成,这种操作方式不仅投入大,效率低,费工时时,而且极其危险,如图1.3所示,这种操作方式存在着极大的安全隐患。在社会文明高度发展的今天,对生命的关爱达到了前所未有的高度,要求停止使用蜘蛛人的呼声不绝于耳,因此人们期待新的具有人性化的清洗方式出现。甚至对于某些场合,采用传统的清洗方法已无能为力。

图1.3 蜘蛛人高空作业现状
2. 设计目的和意义:
机器人技术是近些年热门的新兴技术,已广泛应用于工业、生活中的各个领域,本团队针对在生活中人工清洗玻璃难度高、安全隐患大这一现实问题,设计一款玻璃清洗机器人,力图解决上述现实问题。主要目的和意义如下:

图1.4 机器人清洗玻璃
(1)擦窗机器人属于移动式服务机器人的一种,可在垂直壁而及屋顶移动进行物体表面的清洗作业,大大降低高层建筑的清洗成木,改善工人的劳动环境,提高劳动产生产率,具有相当的社会、经济意义和广阔的应用前景。
(2)根据擦玻璃机器人的特点,擦玻璃机器人可应用大量高楼玻璃的清洗工作,也可以在一层楼上用多个机器,这样可以大大的改善工作效率提高,具有一定的使用价值,可减少人工清洗的危险度,解放社会生产力.
二、作品设计内容
本作品通过设计正副两个擦窗机器人,通过磁力相吸使之紧贴于玻璃两侧,同时清洗玻璃。主要研究内容包含原理设计、结构设计、辅助功能设计三部分,本产品总体设计图如图2.1,2.2所示:

图2.1智能擦窗机器人总体设计图
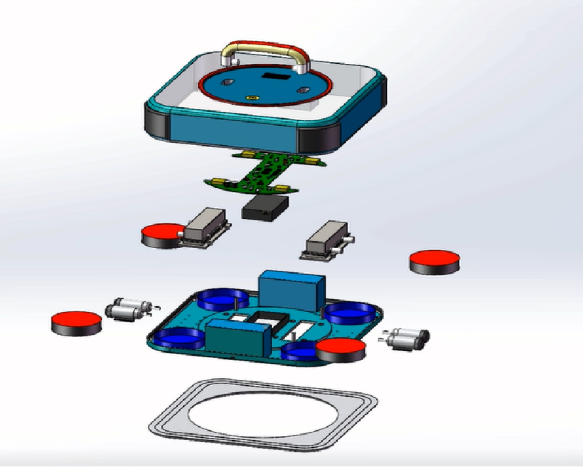
图2.2爆炸图
1)原理设计:通过磁铁相互吸引,使得机器能够更好的固定在玻璃上,在通过自动移动的同时,模拟人工擦拭玻璃表面的动作,通过被相互吸附的磁铁压紧的抹布擦拭清洁玻璃的正反两个平面,起到高效快速清洁玻璃的效果。
2)结构设计:擦窗机器人有正副两个,副机跟随主机运动。在每个机器人内部都有两个蓄水箱,强力磁铁,处理器,锂电池.如图2.3,在机器人外部通过橡胶履带牵引机器人运动,如图2.4所示;
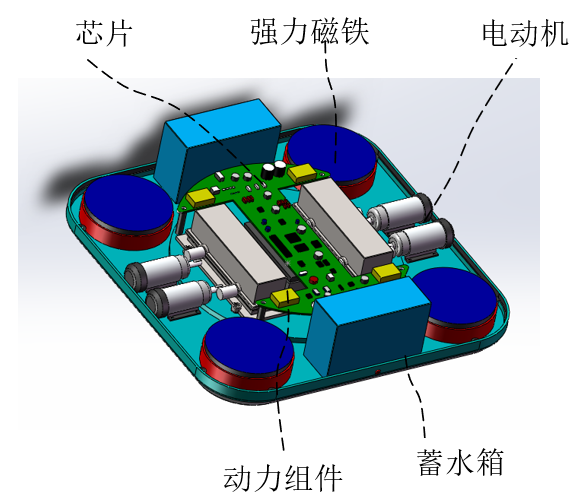
图2.3主要部件图
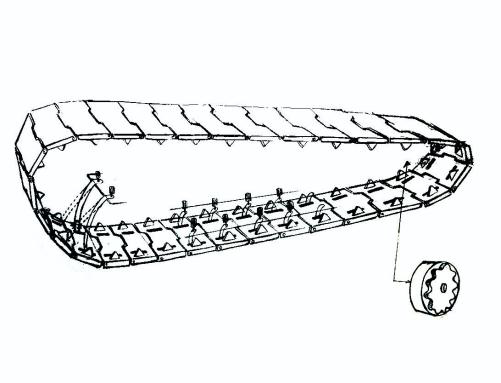
图2.4橡胶履带履带
3)辅助功能设计:
为了更好的适应作业环境,控制方便,操作简单,本项目设计的智能擦窗机器人具有以下6大辅助功能,如图2.5;
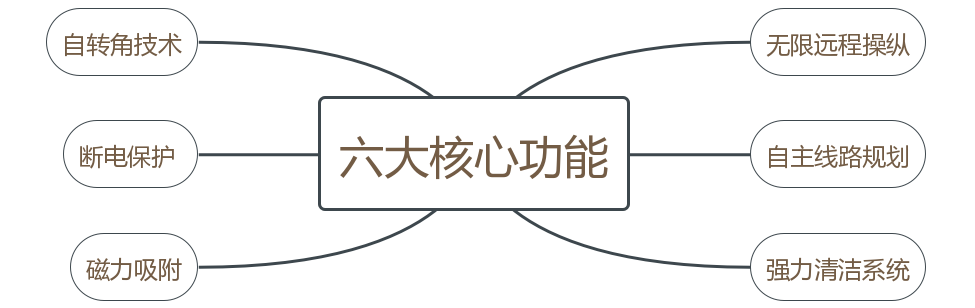
图2.5六大核心功能
① 自转角技术:由于不同曲度的玻璃在折射光时有很大差异,通过机器腹部的光感系统识别后,机器可自动调整清洁区,从而到达清洁区的转换。如图2.6所示中,擦窗机器人能在不同曲度玻璃自动调整清洁区域;

图2.6不同曲度的玻璃幕墙
② 断电保护技术:当机器断电时,内部的锂电池仍会维持机器运作,并有保险绳连接,防止机器掉落,如图2.7所示;

图2.7类似机器人保险绳
③ 磁力吸附:通过内外机器人的磁铁吸附作用,控制机器人与玻璃之间的摩檫力,从而控制机器人的移动,如图2.8所示,通过两磁铁吸引,使内外两机器人吸附在玻璃壁上;
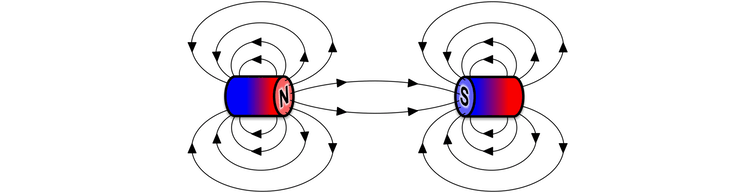
图2.8磁力吸引示意
④ 无线远程操纵技术:搭载先进无线操作系统,实现远程操作。可一次性擦一整面大楼玻璃幕墙。如图2.9利用遥控进行无线操作;

图2.9遥控控制
⑤ 自主线路规划:搭载超高清摄像头,能够在工作过程中不断观察周围环境,调整工作路线,做到无人指挥控制,如图2.10两种路线规划例子
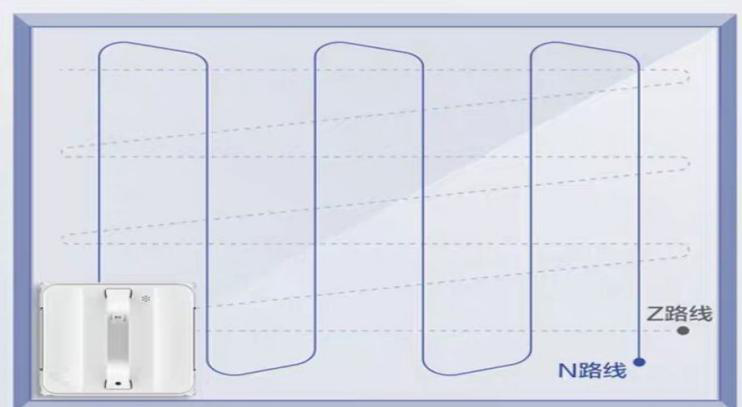
图2.10路线规划例子
⑥ 强力清洁系统:利用磁力与水的吸附性,加大摩擦,使得机器人能紧贴玻璃墙,擦拭强韧,出水口呈细小多孔,抹布抹墙与水洒交替进行,边抹边洒水,清洁更加强力。
三、拟解决的关键问题
1) 对不同形状玻璃的擦拭效果可能不同,对一些大曲率玻璃可能无法擦拭。
2) 由于机器体积较大,更适用于大面积的玻璃,对一些面积较小的玻璃可能比较麻烦。
四、应用前景
根据擦窗机器人的特点,擦窗机器人可应用大量高楼玻璃的清洗工作,也可以在一层楼上用多个机器,这样可以大大的改善工作效率提高,具有一定的使用价值,可减少人工清洗的危险度,也大大地解放社会生产力,所以擦玻璃机器人的市场前景是非常乐观的。


















